强化学习基本问题设置
例子:瓜农种瓜
- 多步决策过程
- 过程中包含 状态、动作、反馈(奖赏) 等
- 需要 多次 种瓜,在过程中不断摸索,才能总结出较好的种瓜策略

抽象化该过程:强化学习(reinforcement learning)
强化学习常用 马尔可夫决策过程 (Markov decision process,MPD)描述
- 机器所处的环境 E
例如在种西瓜任务中,环境 E 是西瓜生长的自然世界
- 状态空间 X : $x\in X$ 是机器感知到的环境的描述
瓜苗长势的描述
- 机器所能采取的行为空间 A
浇水、施肥等行为
- 策略(policy): $\pi:X\rightarrow A$
根据瓜苗状态是缺水时,返回动作浇水
- 潜在的状态转移(概率)函数: $P:X\times A\times A\rightarrow\mathbb{R}$
瓜苗当前状态缺水,选择动作浇水,有一定概率恢复健康,也有一定概率无法恢复
- 潜在的奖赏(reward)函数: $R:X\times A\times X\rightarrow\mathbb{R}$
瓜苗健康对应奖赏+1,瓜苗凋零对应奖赏-10
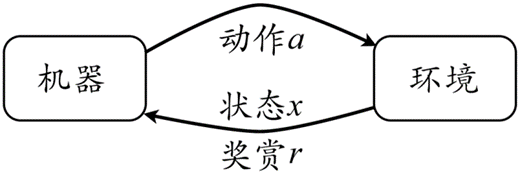
强化学习可以表示为四元组: $E=<X,A,P,R>$
强化学习的目标:机器通过环境 E 中不断尝试,从而学到一个策略 $\pi$ ,使得长期执行该策略后得到的奖励奖赏最大
\[T\text{步积累奖赏: }\mathbb{E}[\frac{1}{T}\sum_{t=1}^T r_t]\\ \gamma\text{折扣积累奖赏: }\mathbb{E}[\sum_{t=0}^{+\infty}\gamma^t r_{t+1}]\\ a=\pi(x)\\ <x_0,a_0,r_1,x_1,a_1,r_2,\dots,x_{T-1},a_{T-1},r_T,x_T>\\ \max \mathbb{E}[\frac{1}{T}\sum_{t=1}^T r_t]\]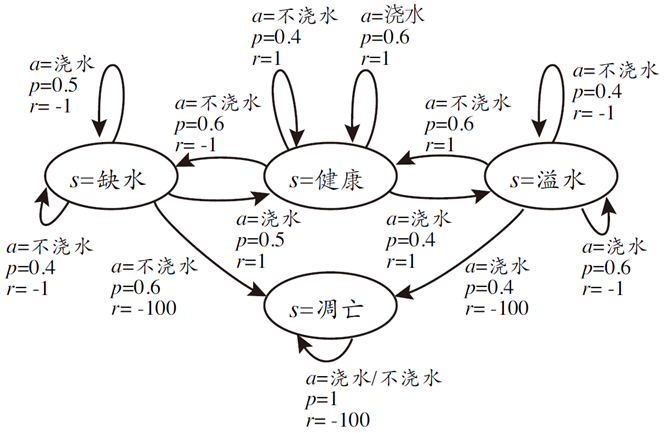
强化学习和监督学习:
- 监督学习:给定标记样本
- 强化学习:没有标记样本,通过执行动作之后反馈的奖赏来学习
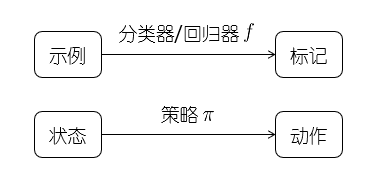
强化学习在某种意义上可以认为是具有“延迟标记信息”的监督学习
K-摇臂赌博机
K-摇臂赌博机(K-Armed Bandit)
- 只有一个状态,K 个动作
- 每个摇臂的奖赏服从某个期望未知的分布
- 执行有限次数动作
- 最大化积累奖赏
强化学习面临的主要困难:探索-利用窘境(exploration-exploitation dilemma)
- 仅探索:估计不同摇臂的优劣(奖赏期望的大小)
- 仅利用:选择当前最优的摇臂
在探索和利用之间进行折中:
- ε-贪心
- Softmax
ε-贪心
- 以 $\varepsilon$ 的概率探索,均匀随机选择一个摇臂
- 以 $1-\varepsilon$ 的概率利用,选择当前平均奖赏最高的摇臂
Softmax
基于当前已知的摇臂平均奖赏来对探索和利用折中
- 若某个摇臂当前的平均奖赏越大,则它被选择的概率越高
- 概率分配使用 Boltzmann 分布:
其中 $Q(i)$ 记录当前摇臂的平均奖赏
两种算法都有一个折中参数 $(\varepsilon,\tau)$ ,算法性能取决于具体应用问题
有模型学习
有模型学习(model-based learning): $E=<X,A,P,R>$
- X,A,P,R 均已知
- 假设状态空间和动作空间均有限
强化学习的目标:找到使积累奖赏最大的策略 $\pi$
策略评估
策略评估:使用某种策略所带来的累计奖赏
- 状态值函数:从状态 x 出发,使用策略 $pi$ 所带来的积累奖赏
- 状态-动作值函数:从状态 x 出发,执行动作 a 后再使用策略 $\pi$ 所带来的积累奖赏
给定 $\pi$ ,值函数的计算:值函数具有简单的递归形式
Bellman 等式:起始点的值等于当前点期望值和下一个点的值之和
- T 步积累奖赏:
- $\gamma$ 折扣累积奖赏
给定 $\pi$ ,状态-动作值函数的计算:通过值函数来表示
\[\left\{ \begin{aligned} &Q_T^\pi(x,a)=\sum_{x'\in X}P_{x\to x'}^a (\frac{1}{T}R_{x\to x'}^a+\frac{T-1}{T}V_{T-1}^\pi(x'))\\ &Q_\gamma^\pi(x,a)=\sum_{x'\in X}P_{x\to x'}^a (R_{x\to x'}^a+\gamma V_\gamma^\pi(x')) \end{aligned} \right.\]最优策略、最优值函数、最优状态-动作值函数
- 最优策略:最大化累积奖赏
- 最优值函数:
- 最优状态-动作值函数
策略改进
最优策略改进:将非最优策略改进为最优策略
- 最优值函数/最优策略满足
- 非最优策略的改进方式:将策略选择的动作改为当前最优的动作
策略迭代
策略迭代(policy iteration):求解最优策略的方法
- 随机策略作为初始策略
- 策略评估+策略改进+策略评估+策略改进+……
- 直到策略收敛
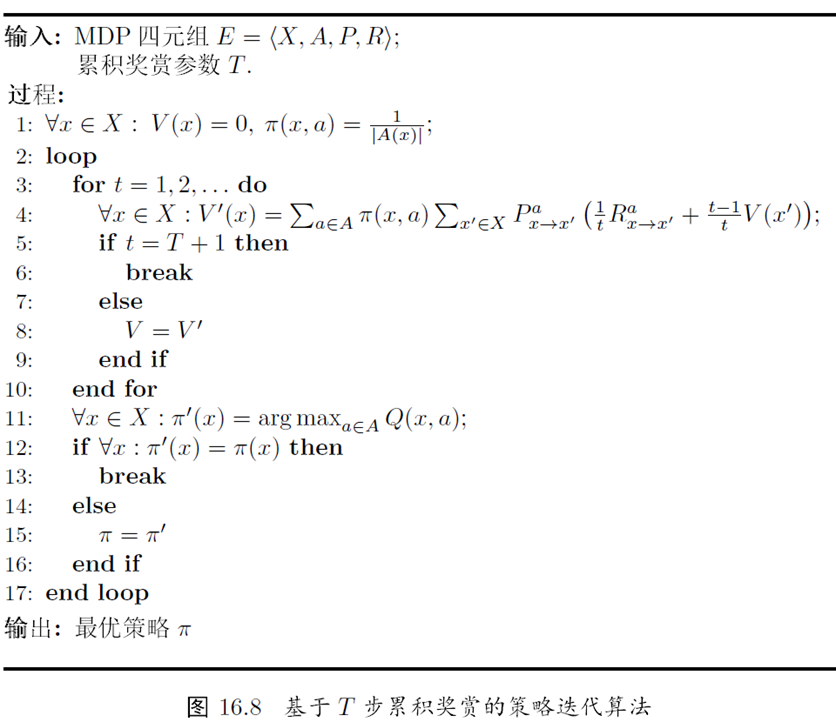
策略迭代算法的缺点:每次改进策略后都重新评估策略,导致耗时
有模型学习小结
- 强化学习任务可归结为基于动态规划的寻优问题
- 与监督学习不同,这里并未涉及到泛化能力,而是为每一个状态找到好的动作
免模型学习
免模型学习(model-free learning):更加符合实际情况
- 转移概率、奖赏函数未知
- 环境中的状态数目未知
- 假定状态空间有限
免模型学习所面临的困难
- 策略无法评估
- 无法通过值函数计算状态-动作值函数
- 机器只能从一个起始状态开始探索环境
解决困难的办法
- 多次采样
- 直接估计每一对状态-动作的值函数
- 在探索过程中逐渐发现各个状态
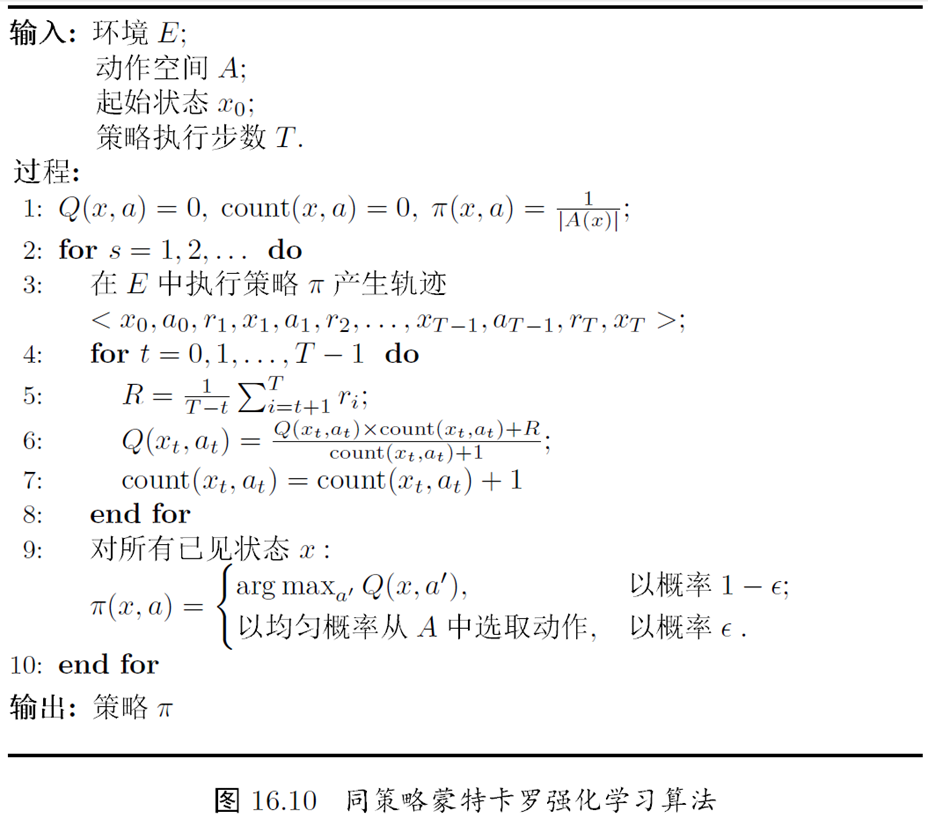
蒙特卡罗强化学习
蒙特卡罗强化学习:采样轨迹,用样本均值近似期望
- 策略评估:蒙特卡罗法
- 从某状态出发,执行某策略
- 对轨迹中出现的每对状态-动作,记录其后的奖赏之和
- 采样多条轨迹,每个状态-动作对的累积奖赏取平均值
- 策略改进:换入当前最优动作
轨迹: $<x_0,a_0,r_1,x_1,a_1,r_2,\dots,x_{T-1},a_{T-1},r_T>$
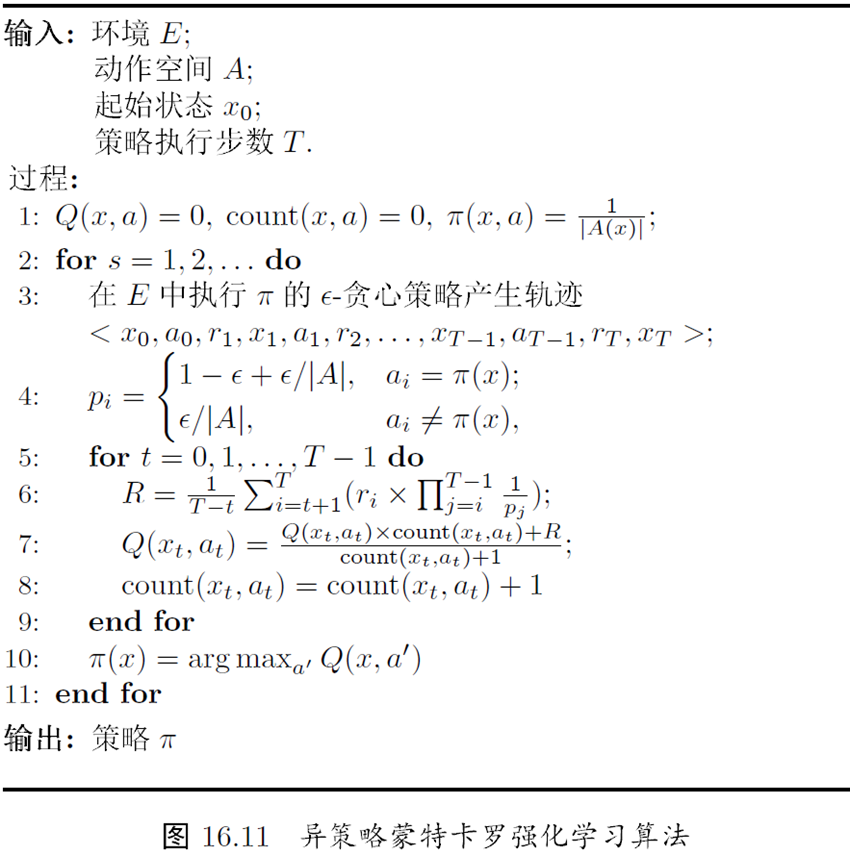
蒙特卡罗强化学习可能遇到的问题:轨迹的单一性
解决问题的方法:ε-贪心法
- 同策略:被评估与被改进的是同一个策略
- 异策略:被评估与被改进的是不同的策略
时序差分学习
蒙特卡罗强化学习的缺点:低效
- 求平均时以“批处理式”进行
- 在一个完整的采样轨迹完成后才对状态-动作值函数进行更新
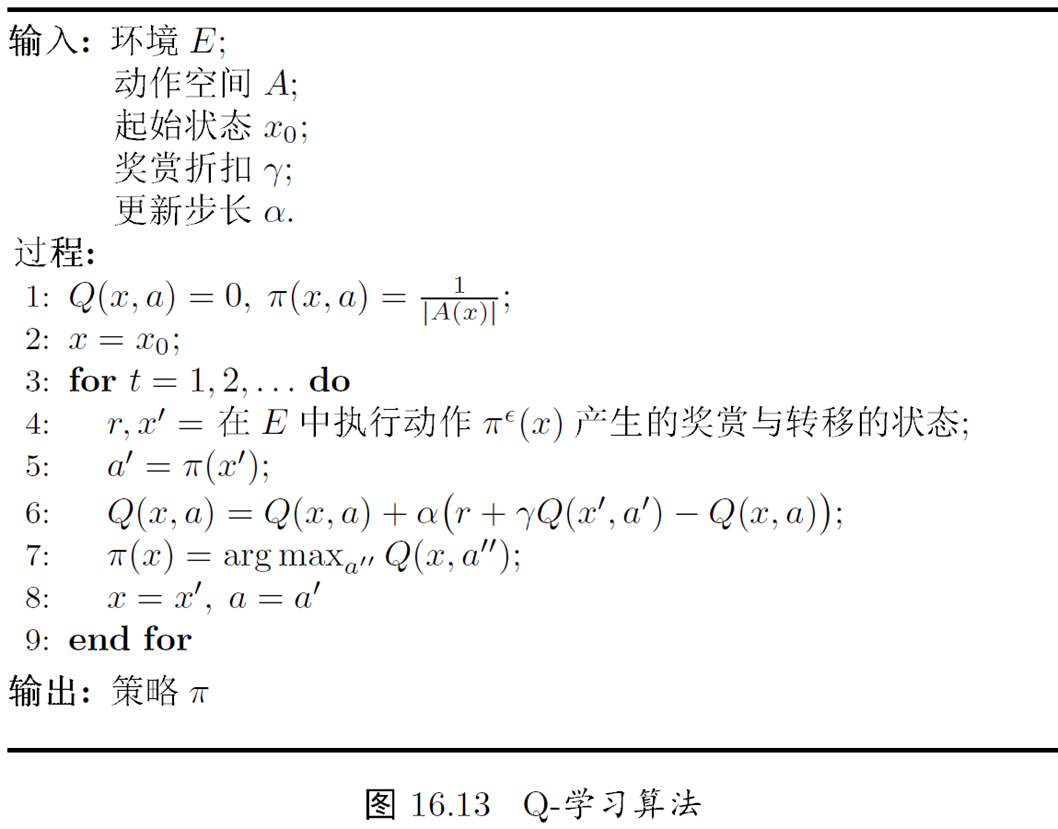
克服缺点的办法:时序差分(temporal difference,TD)学习
时序差分学习:
- 增量式进行状态-动作值函数更新
-
ε-贪心法
- 同策略:Sarsa 算法
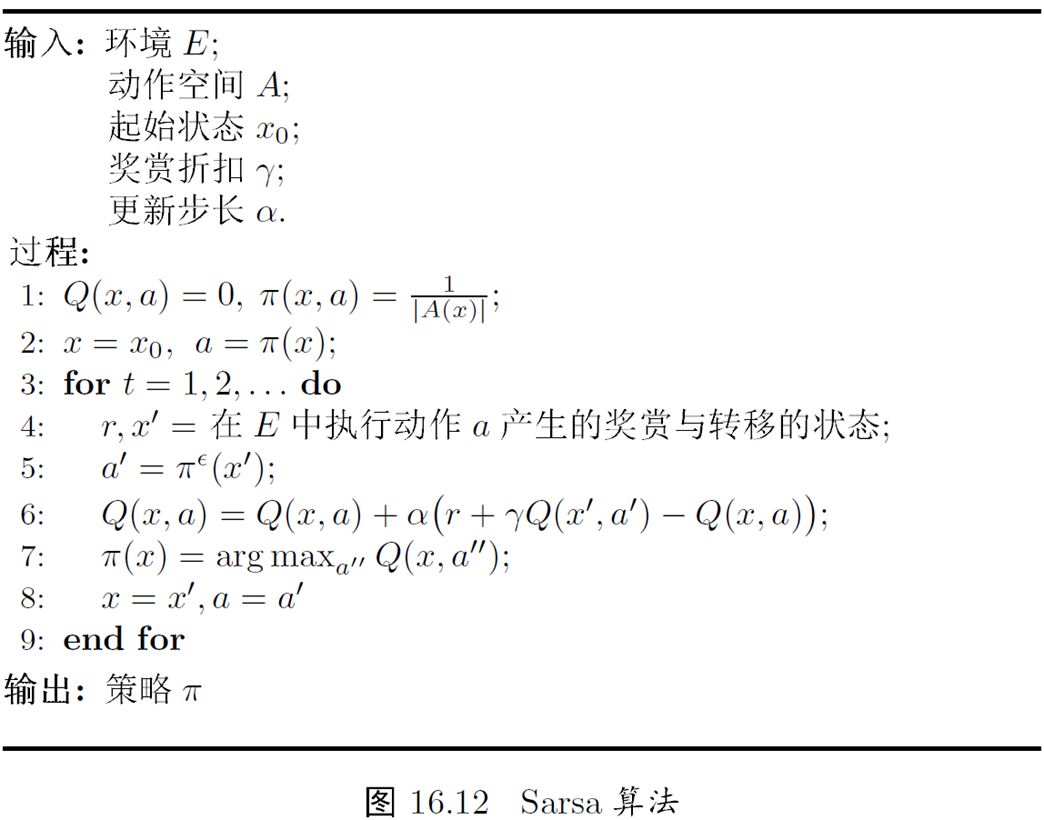
- 异策略:Q-学习(Q-learning)
值函数近似
问题:前面都是假定状态空间是离散(有限)的,如果状态空间是连续(无限)的,该怎么办?
连续状态空间面临的困难:值函数不再是关于状态的“表格值函数”(tabular value function)
解决困难的办法:值函数近似
- 假定状态空间 $X=\mathbb{R}^n$
- 考虑线性近似
- 假定行为空间有限
值函数近似
- 将值函数表达为状态的线性函数
$\theta$ 为状态向量, $x$ 为参数向量
- 使用最小二乘误差来度量学到的值函数与真实的值函数 $V^\pi$ 之间的近似程度
- 用梯度下降法更新参数向量,求解优化问题
状态-动作值函数的线性近似
\[Q_\theta(x,a)=\theta^T(x,a)\\ a=(0,\dots,1,dots,0)\]非线性值函数近似:核方法
模仿学习
强化学习任务中多步决策的搜索空间巨大,基于积累奖赏来学习很多步之前的合适决策非常困难
缓解方法:直接模仿人类专家的状态-动作对来学习策略
- 相当于告诉机器在什么状态下应该选择什么动作
- 引入了监督学习来学习策略
直接模仿学习:
- 利用专家的决策轨迹,构造数据集 D :状态作为特征,动作作为标记
- 利用数据集 D ,使用分类/回归算法即可学的策略
- 将学得的策略作为初始策略
- 策略改进,从而获得更好的策略
人类专家决策轨迹数据:
\[\{\tau_1,\tau_2,\dots,\tau_m\}\\ \tau_i=<s_1^i,a_1^i,s_2^i,a_2^i,\dots,s_{n_i+1}^i>\]构造出的“有标记”数据集:
\[D=\{(s_1,a_1),(s_2,a_2),\dots,(s_{\sum_{i=1}^m n_i},a_{\sum_{i=1}^m n_i})\}\]强化学习任务中,设计合理的符合应用场景的奖赏函数往往相当困难
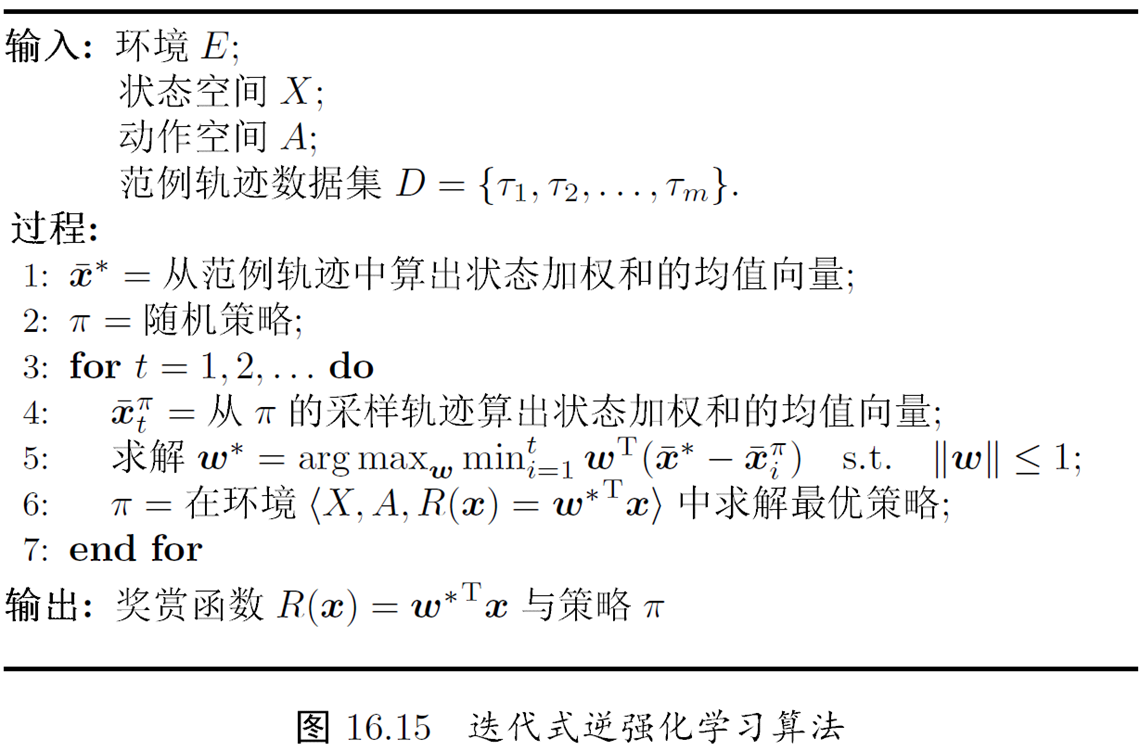
缓解方法:从人类专家提供的范例数据中反推出奖赏函数
逆强化学习(inverse reinforcement learning):寻找某种奖赏函数使得范例数据是最优的,然后使用这个奖赏函数来训练策略
总结
- 强化学习:多步决策过程
- 有模型学习:基于动态规划的寻优
- 如何处理环境中的未知因素:
- 蒙特卡罗强化学习
- 时序差分学习
- 如何处理连续状态空间:值函数近似
- 如何提速强化学习过程:
- 直接模仿学习
- 逆强化学习
参考资料
- 强化学习开源框架整理
- 强化学习-K摇臂赌博机
- 强化学习(Reinforcement Learning, RL)初探
- 合集-Reinforce Learning
- 强化学习 — 马尔科夫决策过程(MDP)
- 1.贝尔曼方程(Bellman equation)
- 机器学习回顾篇(16):蒙特卡洛方法
- 强化学习(四) - 蒙特卡洛方法(Monte Carlo Methods)及实例