并行算法设计
-
并行算法的定义和分类
- 并行算法:一组可同时执行且相互协作的进程集合
- 分类:
- 数值算法:基于代数 非数值算法:搜索、排序、选择、匹配
- 同步算法:进程需要相互等待 异步算法
- 分布式算法:不同引用场景
- 确定算法:过程、结果或时间复杂度确定 非确定算法:随机算法、智能算法
-
并行算法复杂性度量
-
运行时间$t(n)$:n为问题规模、处理器数量$p(n)$、成本$c(n)=t(n)p(n)$ 成本最优性:$c(n)$在最差情况下等于串行算法需要的时间,类似于并行效率接近于1
-
加速比$S_p(n)=t_s(n)/t_p(n)$,$S_p(n)=p(n)$线性加速,>超线性加速(加多少个处理器就加速多少倍)
并行效率$E_p(n)=S_p(n)/p(n)$,范围为0~1,处理器的利用率
工作量$W(n)$,并行算法执行的总操作步数
Brent定理:$t(n)=O(W(n/p+T(n))$
-
设计方法
设计技术
平衡树方法balanced trees method
倍增技术doubling techiques
分治策略divide-and-conquer strategy
划分原理partitioning principle
流水线技术pipelining techniques
设计过程
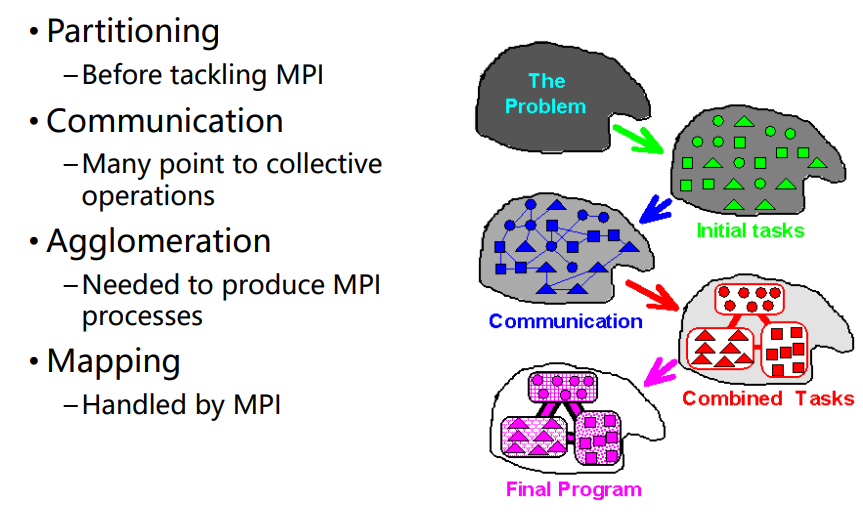
PCAM设计方法学
设计并行算法的四个阶段:partitioning、communication、agglomeration、mapping
- 将给定任务划分成小的任务,域分解或功能分解法(划分单元模块)
- 分析任务间的通信需求(连接单元模块,数据交换)
- 使用组合方法。在保持灵活性的同时,减少通信和开发成本(组合单元模块,程序局部性)
- 将任务分配给处理器,使用负载均衡和任务调度技术提高映射质量,最小化总的执行时间(分配模块组)
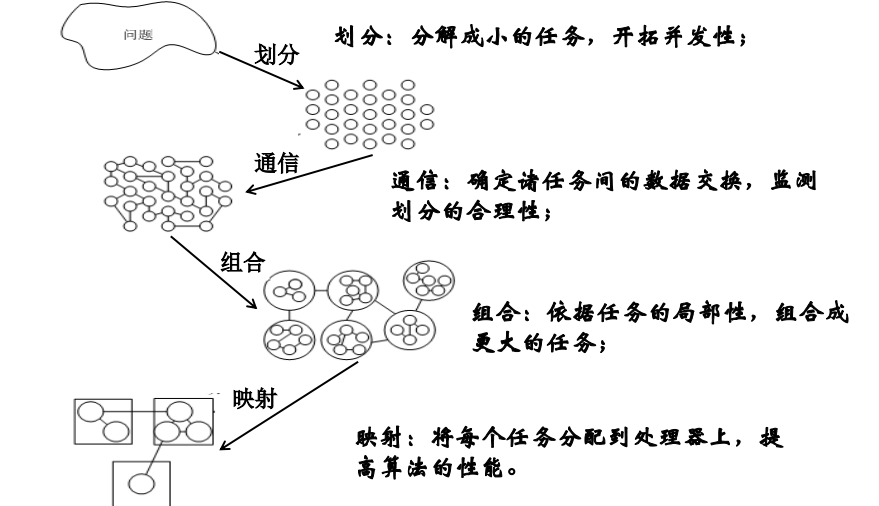
划分
-
划分方法描述
- 开拓算法的并发性和可扩放性
- 两类划分:域分解domain decomposition/数据分解、功能分解functional decomposition
- 先数据分解,再功能分解
- 使数据集和计算机互不相交
- 划分阶段忽略处理器数目和目标机器的体系结构
-
域分解
-
划分对象:数据(输入、中间处理、输出数据)
-
分解结果:大致相等的小数据片
-
划分时应该考虑数据上的操作
-
如果一个任务需要别的任务的数据,会产生任务间通信
-
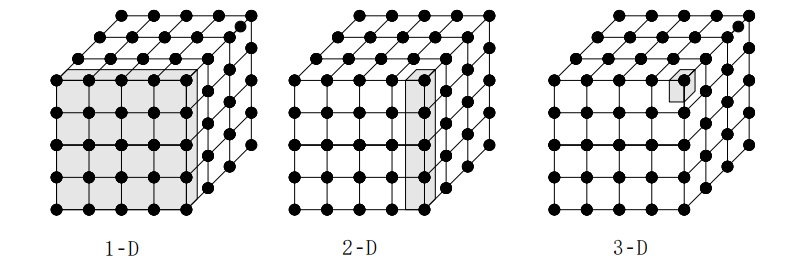
三维网格的域分解:各格点上的计算重复
-
-
功能分解:更深层次的分级
- 划分对象:计算
- 划分后,研究不同任务需要的数据
- 数据不交互,划分成功
- 数据重叠,重新域分解和功能分解
-
实例
-
划分标准:(任务尺寸和任务数量)
- 灵活性:划分任务数>处理器数
- 可扩放性:避免冗余计算、存储
- 均衡:划分的任务尺寸
- 任务数和问题尺寸成比例
- 多种不同划分法
通信
-
通信方法描述:
-
通信是PCAM设计过程的重要阶段
-
划分产生的任务:任务间数据交流,产生通信
-
功能分解确定了任务间的数据流
-
任务是并发执行的,通信限制了任务并发
-
-
四种通信模式
-
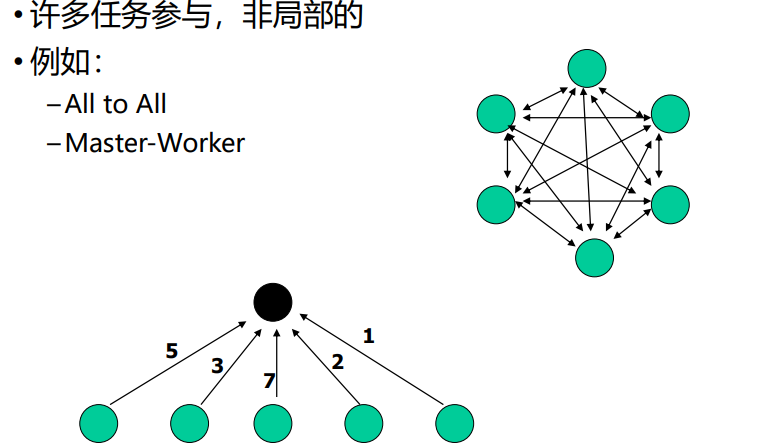
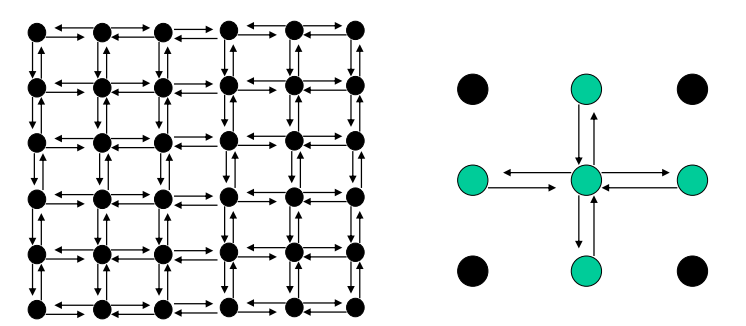
局部/全局通信 local/global communication
-
局部:限制在邻域内,和近邻通信
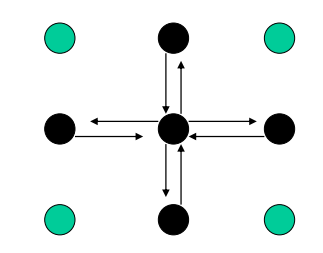
-
多任务参与,非局部,比如 all to all(全连接)、master-worker(主仆)
-
-
结构化/非结构化通信 structure/unstructured
-
结构化:通信模式相同
-
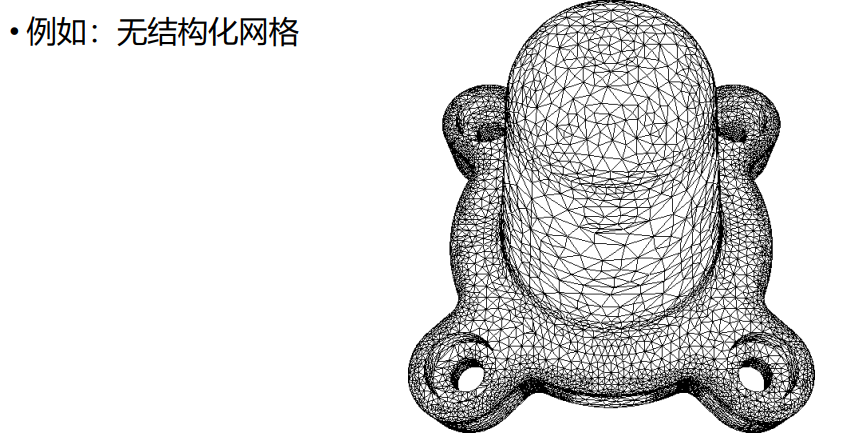
非结构化:没有统一的通信结构
-
-
静态/动态通信 static/dynamic
- 静态:通信伙伴身份不变
- 动态:通信伙伴身份随运行时数据改变
-
同步/异步通信 synchronous/asynchronous
- 同步:双方知道何时通信,发送方显示的发给接受方(你发我就收)
- 异步:不确定,接受方明确得从发送者请求数据(我得请你发,握手)
-
-
通信标准:(通信数量、范围)
- 可扩放性:所有任务执行一样多的通信
- 每个任务尽可能与少量近邻通信,局部通信
- 通信操作可并行
- 不同任务计算可并行
组合
-
方法描述
- 组合:抽象到具体的过程,组合任务在并行机上有效执行
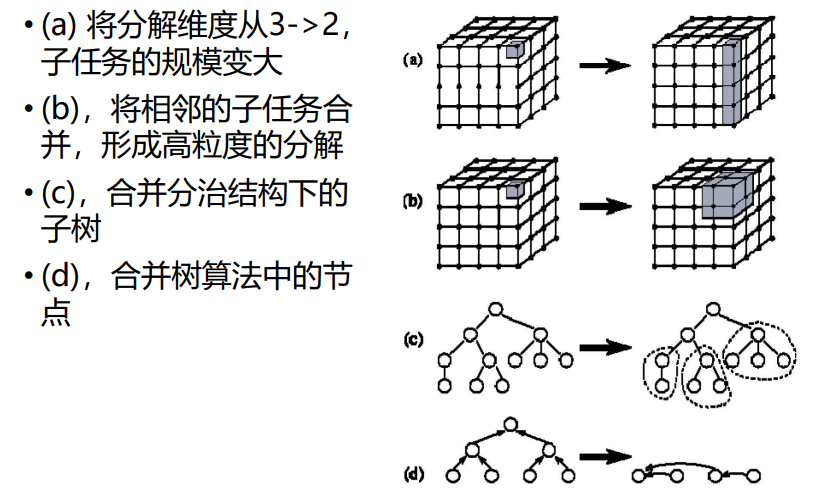
- 合并小尺寸任务,减少任务数,任务数==处理器数
- 增加任务粒度和重复计算,减少通信成本
- 映射和扩展的灵活性,降低软工成本
-
组合例子
-
表面-容积效应 surface-volume effects
- 通信量——任务子集的表面:正比
- 计算量——任务子集的体积:正比
- 增加重复计算——>减少通讯量
-
重复计算
-
重复计算减少了通信量,但增加了计算量,应该保持恰当的平衡 重复计算的目标:减少算法运行的总运算时间
-
-
组合判据
- 增加粒度:减少通信成本
- 重复计算:权衡得益
- 保持灵活性和可扩展性
- 成比例的组合任务数和问题尺寸
映射
-
方法描述
- 每个任务映射到具体的处理器上,定位到运行机器上
- 任务数>处理器数时,存在负载平衡和任务调度问题
- 映射目标:减少算法的执行时间
- 高并发度任务——>不同的处理器
- 任务之间存在高通信的——>同一处理器
- 映射是一种权衡,属于NP完全问题
-
映射策略
- 增强并发性concurrency:任务被不同的处理器并发执行
- 增强局部性locality:通信频繁的任务放在同一个处理器上
-
负载平衡算法
- 静态:实现确定
- 概率:随机确定
- 动态:执行期间动态负载
- 基于域分解:
- 递归对剖
- 局部算法
- 概率方法
- 循环映射
-
任务调度算法
-
将任务放在集中或分散的任务池中,使用任务调度算法将池中的任务分配给特定的处理器
-
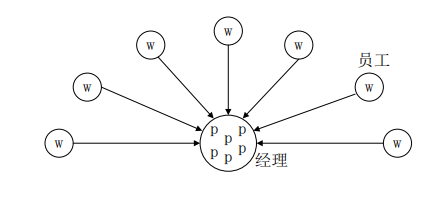
经理/雇员模式
-
非集中模式:分布式调度,每个处理器维护一个任务池
-
-
映射判据
- 采用集中式负载均衡方案,是否存在通信瓶颈
- 采用动态负载平衡方案,调度策略的成本如何
并行程序设计基础
矩阵乘法
n×n和n×n的矩阵
-
普通串行算法运行时间:$O(n^3)$
-
并行算法
- 简单分块算法
- Cannons
- DNS
-
矩阵分块
-
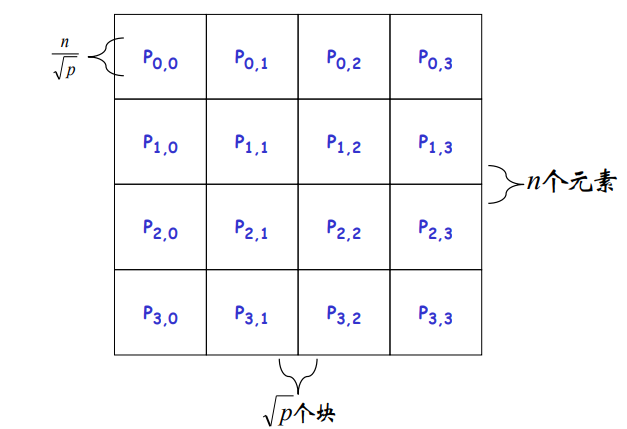
分块:$A、B、C$分成$p=\sqrt{p}\times\sqrt{p}$的方块阵$A_{ij}、B_{ij}、C_{ij}$大小均为$\frac{n}{\sqrt{p}}\times\frac{n}{\sqrt{p}}$
-
$p$个处理器编号为$(P_{0,0},…P_{\sqrt{p}-1,\sqrt{p}-1})$,$P_{i,j}$存放$A_{ij}、B_{ij}、C_{ij}$
-
-
简单并行分块算法
- $P_{i,j}$存放$A_{ij}、B_{ij}、C_{ij}$($n » p$)
- 算法
- 通信: 每行处理器进行$A$矩阵块的多到多播送,得到$A_{i,k},k=0\to \sqrt{p}-1$ 每行处理器进行$B$矩阵块的多到多播送,得到$B_{k,j},k=0\to \sqrt{p}-1$
- 乘-加运算:$P_{i,j}$做$C_{i,j}=\Sigma^{\sqrt{p}-1}{k=0}{A{ik}\cdot B_{kj}}$
- 运行时间:$O(\frac{n^3}{q})$
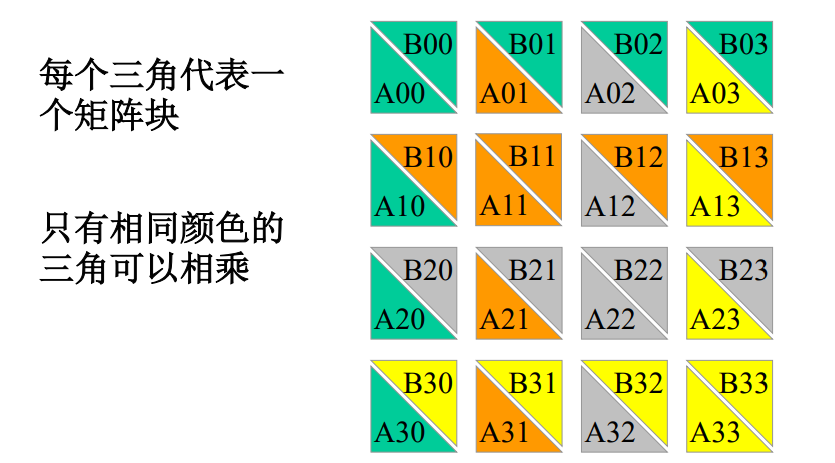
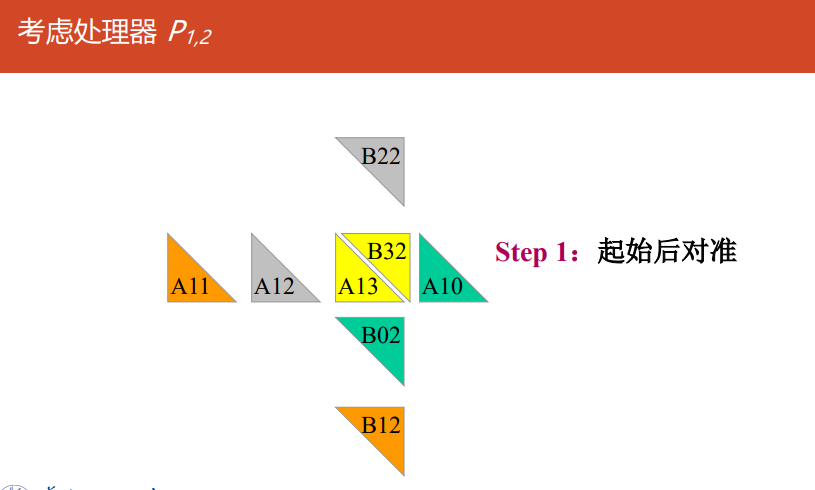
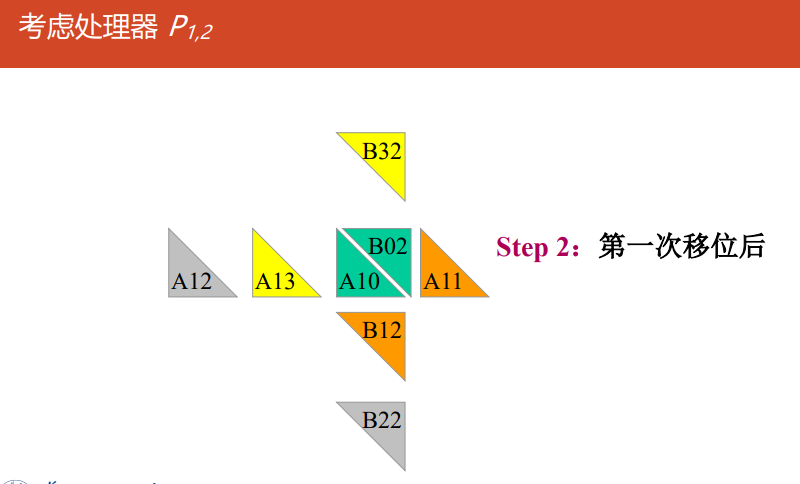
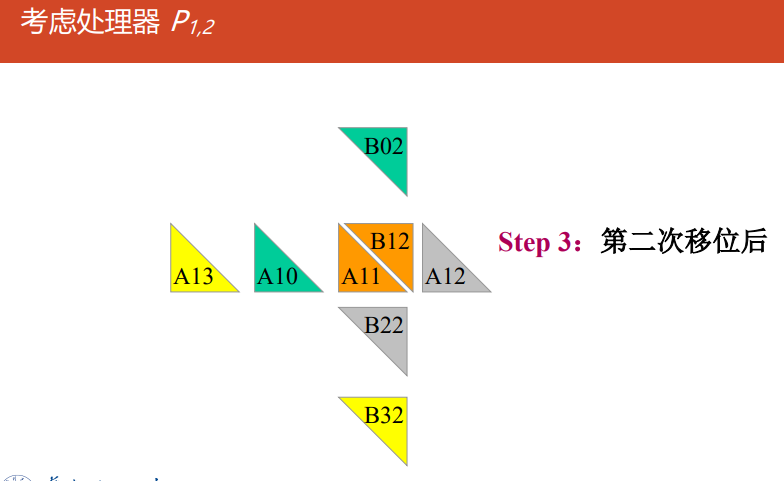
Cannon

-
算法
-
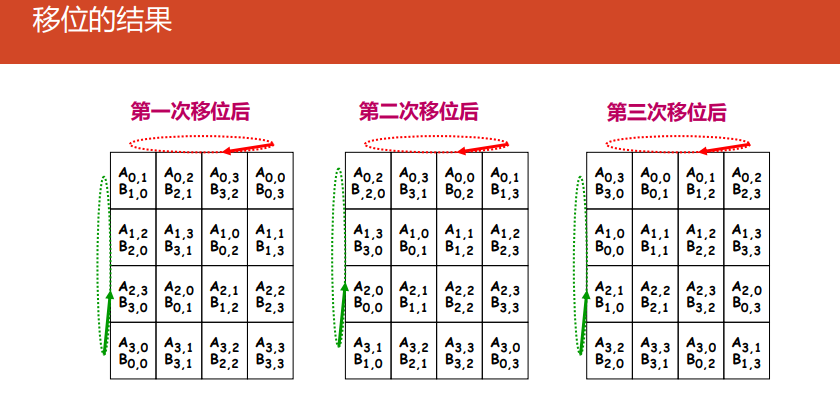
对准:
所有块$A_{ij}(0\le i,j \le \sqrt{p}-1)$向左循环移位$i$步
所有块$B_{ij}(0\le i,j \le \sqrt{p}-1)$向上循环移位$j$步
-
对所有处理器$P_{i,j}$做执行$A_{i,j}$和$B_{i,j}$的乘-加运算
-
移位:
$A$的每个块向左循环移动一步
$B$的每个块向上循环移动一步
-
转到2执行$\sqrt{p}-1$次
-

-
Cannon分块乘法
//输入:$A_{n\times n},B_{n\times n}$ 输出:$C_{n\times n}$ Begin
//对齐 (1) for $k=0 \to \sqrt{p}-1$ do for all $P_{i,j}$ par-do //并行 (i) if $i>k$ then $A_{i,j}\leftarrow A_{i,(j+1)mod\sqrt{p}}$ end if (ii) if $j>k$ then $B_{i,j}\leftarrow B_{(i+1)mod\sqrt{p},j}$ endif endfor endfor
//移位 (2) for all $P_{i,j}$ par-do $C_{i,j}=0$ endfor (3) for $k=0 \to \sqrt{p}-1 $do for all $P_{i,j}$ par-do //并行 (i) $C_{i,j}=C_{i,j}+A_{i,j}B_{i,j}$ (ii) $A_{i,j}\leftarrow A_{i,(j+1)mod\sqrt{p}}$ (iii) $B_{i,j}\leftarrow B_{(i+1)mod\sqrt{p},j}$ endfor endfor End
-
复杂度分析
- 算法有$\sqrt{p}$次循环
- 每次循环中,有$(n/\sqrt{p})\times(n/\sqrt{p})$的矩阵乘法:$\Theta(n^3/p^{3/2})$
- 计算复杂度:$\Theta(n^3/p)$
- 在每个循环,每个处理器发送和接受两个大小为$(n/\sqrt{p})\times(n/\sqrt{p})$的数据块 每个处理器的通信复杂度:$\Theta(n^2/p)$
- 串行算法:$\Theta(n^3)$
- 并行开销:$\Theta(n^2\sqrt{p})$
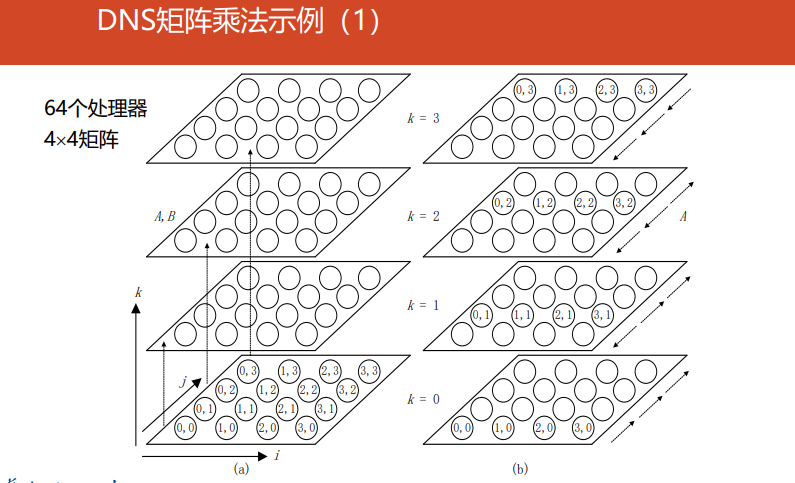
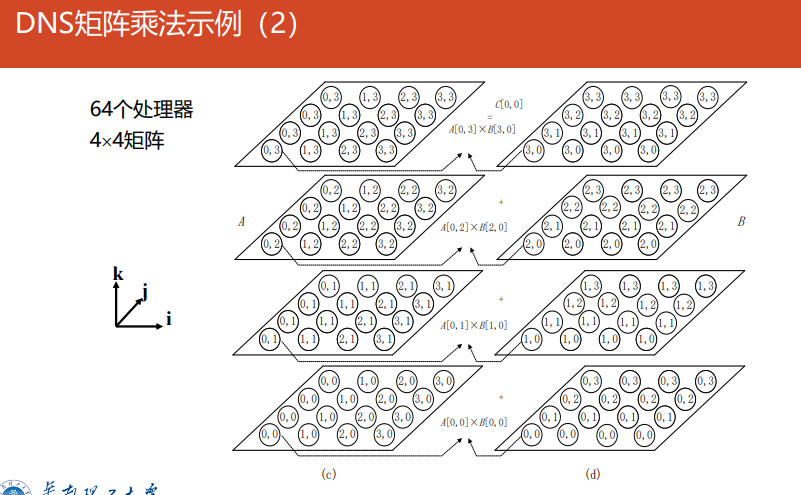
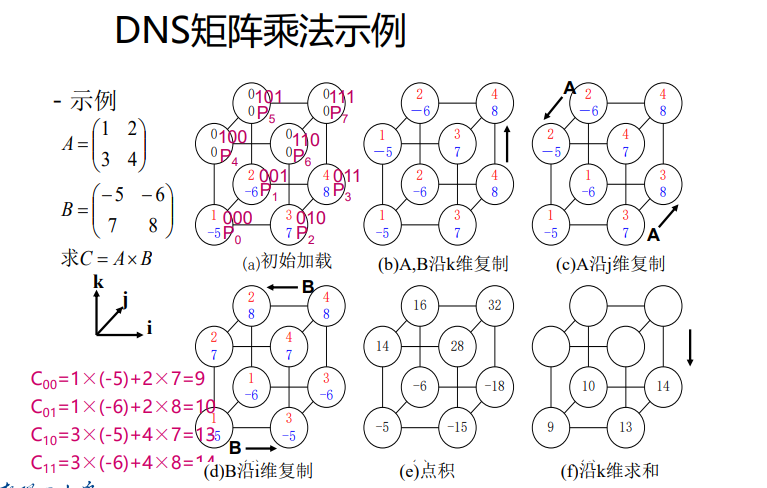
DNS
DNS矩阵乘法思路:利用更多的处理器达到更高的加速比(更类似于普通的并行矩阵乘法+多处理器)
DNS矩阵分块
- 基本思想:通过一到一和一到多的播送方法,使得处理器$(k,i,j)$拥有$a_{i,k}、b_{k,j}$,再进行本地相乘,再沿着$k$方向进行单点积累求和,结果存储在处理器$(0,i,j)$中,时间复杂度$logn$
- 处理器编号:处理器数$p=n^3 =(2^q)^3=2^{3q}$,处理器$P_r$位于位置$(k,i,j)$,这里$r=kn^2+in+j,(0\leq i,j,k\leq n-1)$ 位于$(k,i,j)$的处理器$P_r$的三个寄存器$A_r,B_r,C_r$分别表示为$A[k,i,j],B[k,i,j],C[k,i,j]$,初始均为0
-
DNS矩阵算法描述
算法:初始时$a_{i,j}$和$b_{i,j}$存储于寄存器$A[0,i,j]$和$B[0,i,j]$
- 数据复制:A、B同时在k维复制(一到一播送) A在j维复制(一到多播送),B在i维复制(一到多播送)
- 相乘运算:所有处理器的A、B寄存器两两相乘
- 求和运算:沿k方向进行单点积累求和
并行程序设计概述
并行程序设计基本问题
并行程序设计模型
共享存储编程
多线程
-
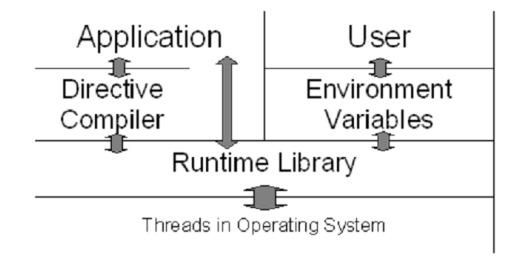
OpenMP 结构:三个API组成,编译制导compiler directives、运行库例程runtime library routines、环境变量environment variables
-
特性:
- 标准化:为各种共享内存、架构平台提供标准,线程编程的高级接口
- 精简:简单有限的共享地址空间指令编程,3~4条指令
- 易于使用:增量并行化串行程序,实现不同粒度任务并行化
- 可移植性:
-
编程模型programming model:
- 基于线程的并行性 多个线程的共享内存进程 显式并行:程序员可控
- 基于编译器指令 通过编译器指令指定并行
- 支持嵌套并行
- 动态线程
-
fork-join model:所有OpenMP程序从单个顺序进程开始,主进程:
- 在并行结构开始时分叉fork:
- 创建一组并行线程
- 并行区域构造并行执行的语句
- 并行执行
- 在并行结构结束时合并join:
- 在线程完成并行结构体语句后同步并终止
- 只存在主线程
- 在并行结构开始时分叉fork:
-
通常的代码结构
#include <omp.h> void saxpy(){ float a, x[ARRAY_SZ], y[ARRAY_SZ]; // 开始并行结构体 #pragma omp parallel { int id=omp_get_thread_num(); int nthrs=omp_get_num_threads(); for(int i=id;i<ARRAY_SZ;i+=nthrs){ y[i]=a*x[i]+y[i]; } } } -
术语terms
- 结构construct:
{并行块} - 指令(制导)directive:
#pragma omp 标识符,该指令指定程序行为 - 团队(线程组)team:合作的多个线程
- 并行区域、串行区域
- 私有private:私有变量命名一个存储块,对引用线程唯一
- 共享shared:team中的所有线程可访问该存储块
- 结构construct:
OpenMP Classic
指令(制导)格式:#pragma omp 指令名 [子句claus,...] 新行newline
#pragma ompOpenMP的C++制导开始符号- 指令名:有效的OpenMP指令,比如
parallel、for、sections、single claus:指令的附加参数,设置属性或控制结构的行为,- newline:换行符,表示指令结束
#pragma omp parallel default(shared) private(beta, pi)
//创建并行区域并对for并行,使用4个线程,动态调度线程,块大小为5
#pragma omp parallel for num_threads(4) schedule(dynamic, 5)
for (int i = 0; i < N; ++i) {
// 并行执行的for循环体
}
并行域
parallel region
-
执行多线程的代码块,基础OpenMP并行结构,格式:
#pragma omp parallel [clause...] newline if(scaler_expression) //满足一定条件才使用并行区域 private(list) //私有变量 shared(list) //共享变量 default(shared|none) //变量默认共享属性 firstprivate(list) //每个私有变量初始值是主线程中的值 reduction(operator:list) //执行规约操作 //在一个并行区域内对数组求和 #include <omp.h> #include <stdio.h> int main() { int sum = 0; #pragma omp parallel if(omp_get_num_threads() > 1) \ private(sum) \ shared(sum) \ default(none) \ reduction(+:sum) { int tid = omp_get_thread_num(); printf("Thread %d is working\n", tid); #pragma omp for for (int i = 0; i < 10; ++i) { sum += i; } } printf("Sum after parallel region: %d\n", sum); return 0; }
parallel directive并行指令
-
在执行parallel指令时,一个线程创建一组线程,并成为主线程,代码被复制,所有的线程都要执行相同的一段代码
-
线程按照从0(主线程)~N-1编号,设置线程数量
使用
omp_set_num_threads()库函数、OMP_NUM_THREADS环境变量 -
动态线程:默认情况下,程序使用相同数量的线程执行每个并行区域,可动态调整线程数
使用
opem_set_dynamic()库函数、OMP_DYNAMIC环境变量 -
并行区域末尾的隐含障碍,只有主线程才能继续执行
计算PI
// 并行区域例子:计算PI
#include<omp.h>
static long num_steps=100;double step;
#define NUM_THREADS 16
void main(){
int i;
double x,pi,sum[NUM_THREADS];
step=1.0/(double)num_steps;
omp_set_num_threads(NUM_THREADS);
#pragma omp parallel{
double x;int id;int i;
id=omp_get_thread_num();
printf("this is thread %d.\n",id);
for(i=id,sum[id]=0.0;i<num_steps;i=i+NUM_THREADS){
x=(i+0.5)*step;
sum[id]+=4.0/(1.0+x*x);
}
}
for(i=0,pi=0.0;i<NUM_THREADS;i++)
pi+=sum[i]*step;
printf("program success terminated!\n");
printf("pi is %lf.\n",pi);
}
共享任务结构
work-sharing constructs
- 在team中的线程之间划分执行区域、
- 在结构体末端设置隐含障碍
- 结构体进入时没有隐含障碍
- 工作共享结构体不会启动新线程
结构类型
-
#prama omp parallel创建并行区域,代码块中多个线程并行#pragma omp parallel { // 并行执行的代码块 } -
#prama omp for所有线程共享循环中的迭代次数,实现数据并行data parallelism,提高循环的效率#pragma omp parallel { #pragma omp for for (int i = 0; i < N; ++i) { // 并行执行的for循环体 } } //reduction(operator:list):归约操作 //指定的归约操作operator:+、*、max、min,对私有变量合并成全局结果 //schedule(type[, chunk_size]):指定循环迭代的调度方式,详细见下面示意图 //schedule的type参数: //dynamic:每个线程 完成一次迭代后 请求获取下一个迭代 //static:每个线程获取 一块连续的迭代 //guide:每个线程在完成一块迭代后, 根据剩余的迭代数量 ,动态地调整获取下一个块的大小 //runtime:实际的调度策略将在运行时由库来确定,这意味着编译时不需要指定调度类型和chunk_size //指定块chunk大小,控制每个线程获取的循环迭代的数量 //collapse(n):合并n层嵌套的循环 //nowai:指示在 for 循环中的并行区域结束后,不要等待所有线程都完成,而是直接继续执行后续的代码。 //它告诉编译器不要生成一个隐式的同步点。提高性能,减少不必要的同步开销。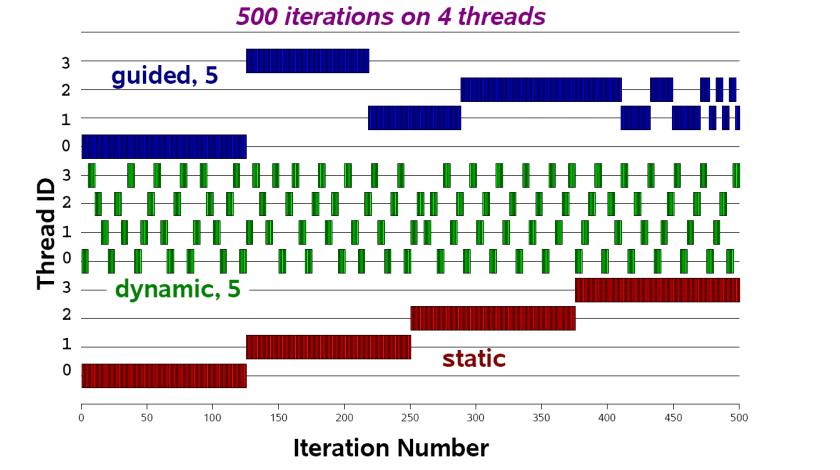
#include <omp.h> #define CHUNKSIZE 100 #define N 1000 void main (){ int i, chunk; float a[N], b[N], c[N]; /* Some initializations */ for (i=0; i < N; i++) a[i] = b[i] = i * 1.0; chunk = CHUNKSIZE; #pragma omp parallel shared(a,b,c,chunk) private(i) { #pragma omp for schedule(dynamic,chunk) nowait for (i=0; i < N; i++) c[i] = a[i] + b[i]; } /* end of parallel section */ } -
#prama omp single代码块中的部分只能由一个线程执行#pragma omp parallel { #pragma omp single { // 只由一个线程执行的代码块 } } -
#prama omp sections将任务分成独立的部分,每个部分由一个线程执行,实现功能并行functional parallelism#pragma omp parallel { #pragma omp sections { #pragma omp section { // 并行执行的第一个部分 } #pragma omp section { // 并行执行的第二个部分 } } }include <omp.h> #define N 1000 void main (){ int i; float a[N], b[N], c[N]; /* Some initializations */ for (i=0; i < N; i++) a[i] = b[i] = i * 1.0; #pragma omp parallel shared(a,b,c) private(i) { #pragma omp sections nowait { #pragma omp section for (i=0; i < N/2; i++) c[i] = a[i] + b[i]; #pragma omp section for (i=N/2; i < N; i++) c[i] = a[i] + b[i]; } /* end of sections */ } /* end of parallel section */ } -
#pragma omp parallel for==parallel+for组合共享任务机构combined parallel work-sharing constructs#include <omp.h> #define N 1000 #define CHUNKSIZE 100 void main () { int i, chunk; float a[N], b[N], c[N]; /* Some initializations */ for (i=0; i < N; i++) a[i] = b[i] = i * 1.0; chunk = CHUNKSIZE; #pragma omp parallel for shared(a,b,c,chunk) private(i) schedule(static,chunk) for (i=0; i < n; i++) c[i] = a[i] + b[i]; }
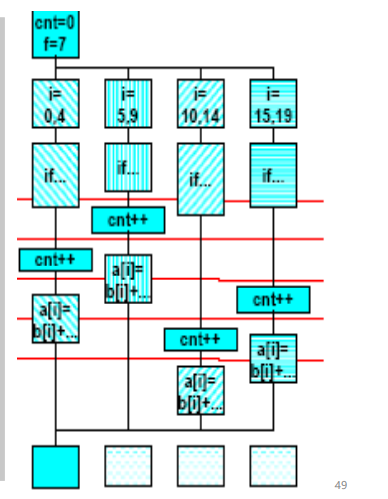
同步结构
synchronization constructspragma omp critical创建临界区的指令。
它用于标记一段代码,确保在任何时刻只有一个线程能够执行该代码块,从而避免多个线程同时访问共享资源引发的竞态条件问题。
cnt = 0;
f=7;
#pragma omp parallel
{
#pragma omp for
for (i=0; i<20; i++) {
if (b[i] == 0) {
#pragma omp critical
cnt ++;
} /* endif */
a[i] = b[i] + f * (i+1);
} /* end for */
} /*omp end parallel */
- 其他同步指令
- master:只有主线程(线程编号为0的线程)执行的代码块,其他线程会跳过这个代码块
- barrier:创建一个同步点,确保所有线程在此处等待,直到所有线程都到达这个点
- atomic:创建一个原子操作,确保某个操作是原子的,即不会被其他线程中断
- flush:强制刷新共享内存中的变量,确保变量的值是最新的,解决内存可见性问题
- ordered:指定一段代码应该按照循序执行,通常和for一起使用
总结:
- 并行结构:parallel
- 共享任务结构:sections、for、single
- 组合结构:parallel for、parallel section
- 同步结构:critical…
数据环境
data environment
- 数据视图参数data scope clause:描述数据在不同线程之间的分布和访问方式的机制,以指导编译器如何处理数据的分布和访问。
- 明确定义变量的作用域,大多数变量默认是共享的
- 全局变量:文件作用域变量
- 私有变量:循环索引变量、从并行区域中调用的子程序堆栈变量
数据域属性子句
data scope clauses
-
#pragma...shared所有线程都共享这些变量,但每个线程有自己的本地副本。
int sharedVariable = 0; #pragma omp parallel shared(sharedVariable) { // 所有线程共享 sharedVariable 变量,但有本地副本 } -
#pragma...private每个线程都将拥有这些私有变量的一个副本,不同线程之间不会共享。并行区域内创建
#pragma omp parallel private(x, y) { // 每个线程有私有的 x 和 y 变量 } -
#pragma...firstprivateprivate的超集
私有变量列表,并将这些变量的初始值设为主线程中的值。
对变量做原子化的初始化
int initialValue = 10; #pragma omp parallel firstprivate(initialValue) { // 每个线程有私有的 initialValue 变量,初始值为主线程中的值 } -
#pragma...lastprivate其值将从循环的最后一次迭代复制回并行区域之外的原始变量。
int result = 0; #pragma omp parallel for lastprivate(result) for (int i = 0; i < N; ++i) { result = i; } // 并行区域之后,result 将具有循环的最后一次迭代的值#include<pmp.h> void main(){ int i,A,B,C; A=10; #pragma omp parallel { #pragma omp for private(i) firstprivate(A) lastprivate(B) for(i=0;i<10;i++;){ B=A+i; } C=B; } } // A=10;B=19;C=19 -
#pragma...threadprivate每个线程具有私有实例。每个线程都将有其自己的这些变量的副本。全局范围内创建
在多个pallel区域执行期间,将全局文件作用域的变量变成local且persistent的
和private的区别在于线程范围内是persistent的
#pragma omp threadprivate(variable1, variable2) int variable1, variable2; int main() { // 每个线程都将有其自己的 variable1 和 variable2 的副本 }int alpha[10],beta[10],i; #pragma omp threadprivate(alpha) void main(){ #pragma omp parallel private(i,beta) for(i=0;i<10;i++) alpha[i]=beta[i]=i; printf("%d,%d",alpha[5],beta[5]);//5 0 #pragma omp parallel printf("%d,%d",alpha[3],alpha[3]);//3 0 } -
#pragma...default没有特定子句的情况下变量的默认数据共享属性
#pragma omp parallel default(shared) { // 变量默认为共享 } -
#pragma...reduction对一个或多个变量进行归约操作。这将创建每个线程的私有副本,并在并行区域结束时将结果合并。
int sum = 0; #pragma omp parallel for reduction(+:sum) for (int i = 0; i < N; ++i) { sum += i; }#include <omp.h> void main () { int i, n, chunk; float a[100], b[100], result; /* Some initializations */ n = 100; chunk = 10; result = 0.0; for (i=0; i < n; i++) { a[i] = i * 1.0; b[i] = i * 2.0; } #pragma omp parallel for default(shared) private(i) \ schedule(static,chunk) \ reduction(+:result) for (i=0; i < n; i++) result = result + (a[i] * b[i]); printf("Final result= %f\n",result); } //656700.00000 -
#pragma...copin将从主线程拷贝到所有线程的本地副本
int sharedValue = 42; #pragma omp parallel copyin(sharedValue) { // 所有线程都有 sharedValue 的本地副本 } #pragma omp parallel copyprivate(sharedValue) { // 并行区域结束时,将 sharedValue 的本地副本拷贝回主线程 }
环境变量
控制和配置OpenMP运行时行为的设置。这些变量允许用户在不修改程序源代码的情况下调整程序的行为
-
OMP_SCHEDULE:用于指定并行循环的调度方式。可以设置为
static、dynamic、guided等。例如,export OMP_SCHEDULE="dynamic" -
OMP_NUM_THREADS:用于设置并行区域中的线程数目。可以指定一个具体的数字,如
export OMP_NUM_THREADS=4,或者使用系统默认值。 -
OMP_DYNAMIC:控制OpenMP是否允许动态调整线程数目。设置为
true允许动态调整,false则禁止。例如,export OMP_DYNAMIC=false -
OMP_NESTED:控制是否允许嵌套并行。设置为
true允许嵌套并行,false则禁止。例如,export OMP_NESTED=true
OpenMP Offload
OpenMP 的一个扩展,用于支持将计算任务和数据移动到异构设备(如 GPU)上执行。
-
目标设备(Target Device):目标设备通常是 GPU,但也可以是其他加速器设备
-
target指令:target指令是 Offload 扩展的主要构建块。它用于标识并行区域,其中的计算任务将被移动到目标设备上执行。#pragma omp target { // 在目标设备上执行的计算任务 } //声明和结束设备代码(目标设备上的代码)的范围。 //这样的声明允许将特定的函数标记为在目标设备上执行的代码。 //声明一个函数(或函数的一部分)是设备代码,将在目标设备上执行。 #pragma omp declare target int devicefunc(){ … } #pragma omp end declare target //结束设备代码的声明范围 #pragma omp target { result = devicefunc(); }
管理设备数据
-
target data指令:标识数据区域,其中的数据将被传输到目标设备上。-
主机和设备有独立的内存空间,数据需要映射到target device才能使用
-
数据环境在关闭大括号时销毁,自动释放
#pragma omp target data map(to: A) map(from: B) { // 在目标设备上使用 A,并将结果传回 B }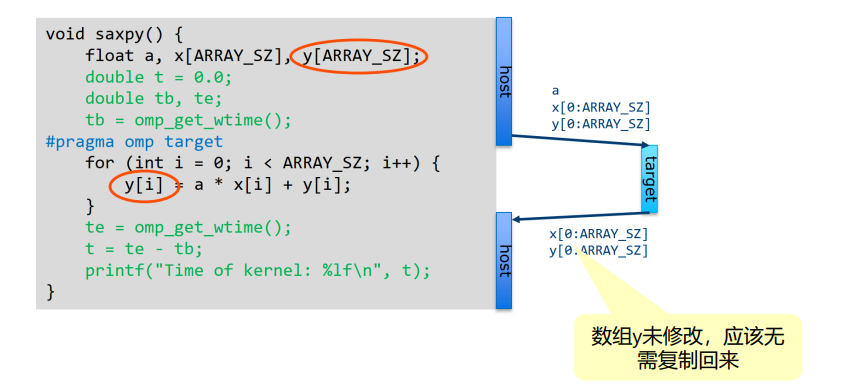
-
-
数据映射(Data Mapping):主机和目标设备之间如何共享数据。
map子句用于指定数据传输的方向(to、from或tofrom)以及要传输的变量。#pragma omp target data map(to: A, B) map(from: C) { // 在目标设备上使用 A 和 B,并将结果传回 C } void saxpy(float a, float* x, float* y, int sz) { double t = 0.0; double tb, te; tb = omp_get_wtime(); #pragma omp target map(to:x[0:sz]) \ map(tofrom:y[0:sz]) for (int i = 0; i < sz; i++) { y[i] = a * x[i] + y[i]; } te = omp_get_wtime(); t = te - tb; printf("Time of kernel: %lf\n", t); }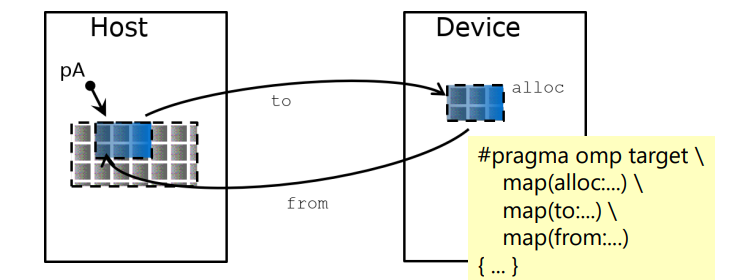
-
target teams指令:标识一个团队,其中的工作项将被移动到目标设备上执行。与parallel for等结合使用,执行并行循环。#pragma omp target teams distribute parallel for for (int i = 0; i < N; ++i) { // 在目标设备上并行执行的循环 } -
target数据传输管理指令:target enter data,target exit data, 和target update-
target enter data将数据从主机传输到目标设备,但不包括实际的数据传输。它告诉编译器在目标设备上为数据分配空间,并在目标设备上的数据环境中创建数据。
int data[N]; #pragma omp target enter data map(to: data) { // 此处不执行实际数据传输,但在目标设备上为 data 分配空间 } -
target exit data将数据从目标设备传输回主机,但不包括实际的数据传输。它告诉编译器在目标设备上释放数据,并在目标设备上的数据环境中销毁数据。
int result[N]; #pragma omp target exit data map(from: result) { // 此处不执行实际数据传输,但在目标设备上释放 result 的空间 } -
target update实际的数据传输,将数据从主机传输到目标设备或从目标设备传输回主机int array[N]; // 将数据传输到目标设备 #pragma omp target enter data map(to: array) // 在目标设备上修改 array // 将更新传输回主机 #pragma omp target update from(array)
#pragma omp target enter data map(to: y) map(alloc: x) #pragma omp target { ...//1st target region, device operations on x and y } #pragma omp target update from(y) //将y的值复制回Host host_update(y); #pragma omp target update to(y) //将y的值更新到device #pragma omp target { ...//2nd target region, device operations on x and y } #pragma omp target exit data map(from:x)-
target declare显式声明设备上的全局变量#pragma omp declare target int a[N] #pragma omp end declare target … init(a); #pragma omp target update to(a) … #pragma omp target teams distribute parallel for for (int i=0; i<N; i++){ result[i] = process(a[i]); }
-
并行
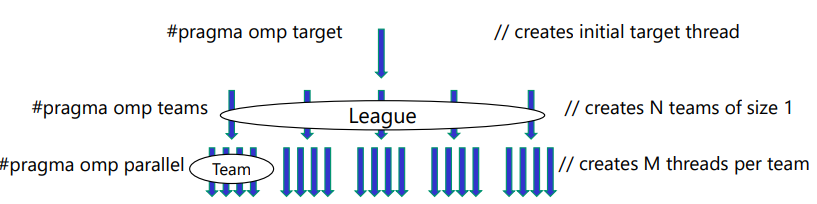
OpenMP Offload主要用于在GPU上进行并行计算
threadblock——>streaming multiprocessor——>subslice
Threadblock(线程块):
- 在GPU编程中,Threadblock 是一组并行执行的线程的集合。
- 线程块是GPU上的一个独立的执行单元,通常由若干个线程组成。
- 线程块中的线程可以协同工作,通过共享内存进行通信,并利用SIMD(单指令多数据)的并行性执行相同的指令。
SM(Streaming Multiprocessor,流处理器):
- SM 是GPU的核心执行单元,它包含一定数量的CUDA核心(NVIDIA GPU的术语)或流处理器(AMD GPU的术语)。
- 每个SM可以执行多个线程块,它负责管理线程的调度和执行。不同的GPU架构中,SM的数量和特性可能有所不同。
- 不同team的线程之间不能同步
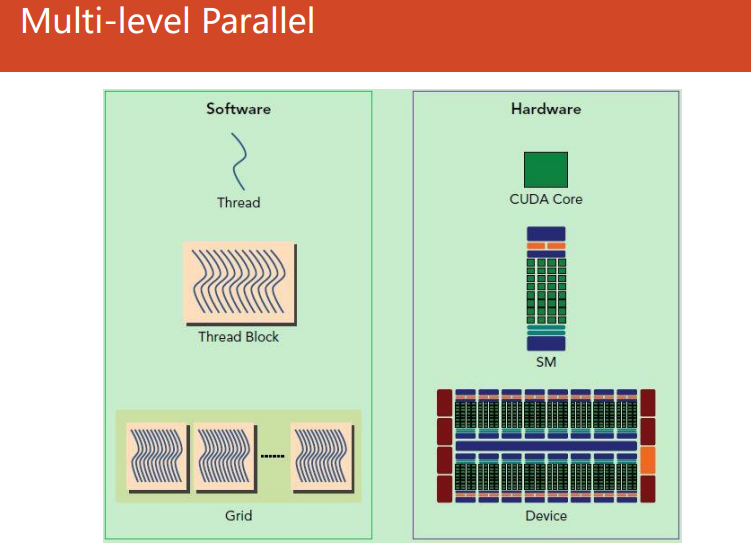
Subslice(子片):
- Subslice 是GPU中的一个术语,描述GPU核心或SM内的一部分。
- GPU通常被组织成若干个子片,每个子片包含一定数量的CUDA核心或流处理器。Subslice的概念涉及到硬件细节。
- subslice外没有完整的线程
消息传递编程:MPI
MPI概述
-
用于编写并行程序的标准和库,它允许在分布式内存系统上进行并行计算。程序能够在多个处理器之间进行通信和协调。
-
MPI编程范式:每个处理器运行一个子程序
- 串行语言编写(串)
- 所有变量私有(私)
- 特殊子程序调用进行通信(子)
-
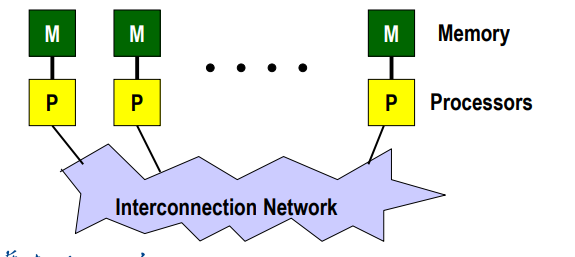
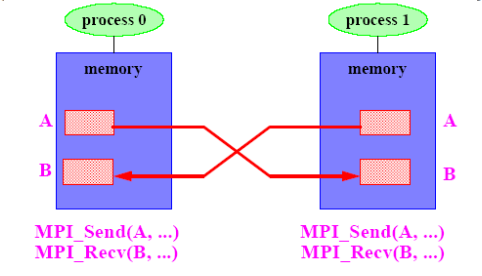
MPI编程模型(如上图)
- 一组进程,每个进程都有本地数据,通过发送和接受信息通信
- 独立进程、独立地址空间、分布式存储内存
- 进程独立并发执行,合作传输数据
-
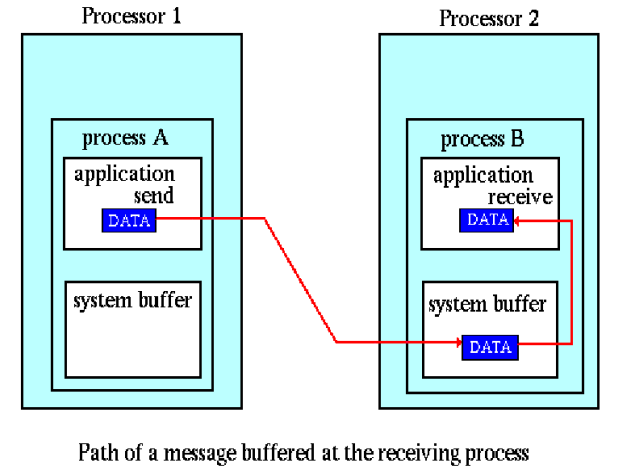
MPI消息:子程序之间移动的数据包,消息传递系统执传递消息需要的信息:
- 发送处理器、源位置
- 数据类型、数据长度
- 接受处理器、目的地位置、目的地大小
-
MPI通信:访问、寻址、接受,通信类型(点对点、集体、同步异步)(发给谁、发到哪里、收不收、收什么)
- 点对点通信:一个进程向另一个进程发送信息
- 同步发送、异步发送
- 阻塞操作:操作完成后才呼叫中返回(发完等) 非阻塞操作:直接返回(只管发)
- 集体通信:涉及多个进程的更高级别的例程
- 通过点对点通信
- 通过障碍同步进程
- 通过广播一对多通信
- 归约多个进程的数据
- 点对点通信:一个进程向另一个进程发送信息
MPI并行编程
MPI并行程序结构
- MPI包含文件——>初始化MPI环境——>执行工作并进行报文通信——>终止MPI环境
- 创建并行、处理器通信、同步(消息传递实现点对点、集体通信实现全局同步)
- MPI应用的组成:处理器+通信通道=
MPI_COMM_WORLD
//每个进程都输出自己的排名、总进程数和处理器名称
//hello.c
#include "mpi.h"
#include <stdio.h>
int main( int argc, char *argv[] )
{
int rank, size, namelen;
char processor_name[MPI_MAX_PROCESSOR_NAME];
MPI_Init( &argc, &argv );
MPI_Comm_rank( MPI_COMM_WORLD, &rank );
MPI_Comm_size( MPI_COMM_WORLD, &size );
MPI_Get_processor_name(processor_name, &namelen);
printf("Hello World! I'm rank %d of %d on %s\n",
rank, size, processor_name);
MPI_Finalize();
return 0;
}
//MPI_Init(&argc, &argv): 初始化MPI环境。必须在程序中的MPI调用之前调用这个函数
//MPI_Comm_rank(MPI_COMM_WORLD, &rank): 获取当前进程在通信器MPI_COMM_WORLD中的排名。
//每个进程都有一个唯一的排名,范围从0到size-1。
//MPI_Comm_size(MPI_COMM_WORLD, &size): 获取通信器MPI_COMM_WORLD中的总进程数,将其存储在变量size中
//MPI_Get_processor_name(processor_name, &namelen): 获取处理器的名称,并将其存储在数组processor_name中
//MPI_Finalize(): 结束MPI环境。必须在程序的MPI调用结束后调用这个函数
//mpicc -o hello hello.c
//mpirun -np 4 ./hello
点对点通信
rank 表示每个进程在一个通信体中的唯一标识符。通信体是一个MPI程序中的一个逻辑组,其中包含多个进程。
tag 是用于区分不同类型消息的整数值。在MPI通信中,发送和接收操作可以通过 tag 来选择性地匹配消息。
通信体comm是MPI中用于定义一组进程之间通信关系的对象。通信体定义了一组进程的范围,可以是全局的(例如,MPI_COMM_WORLD 包含所有进程)也可以是局部的。
-
MPI基本的发送/接受
-
MPI_SEND发送操作int MPI_Send(const void *buf, int count, MPI_Datatype datatype, int dest, int tag, MPI_Comm comm); //buf:指向要发送的数据的缓冲区的指针。 //count:要发送的数据元素的数量。 //datatype:数据元素的类型。 //dest:目标进程的排名(rank)。 //tag:标签,用于区分不同类型的消息。 //comm:通信器,通常使用MPI_COMM_WORLD表示所有进程的通信。 -
MPI_RECV接受操作int MPI_Recv(void *buf, int count, MPI_Datatype datatype, int source, int tag, MPI_Comm comm, MPI_Status *status); //buf:指向用于存储接收数据的缓冲区的指针。 //count:要接收的数据元素的数量。 //datatype:数据元素的类型。 //source:源进程的排名,如果指定为MPI_ANY_SOURCE,则表示接收任意源的消息。 //tag:标签,用于匹配发送消息的标签。进程组ID //comm:通信器,通常使用MPI_COMM_WORLD表示所有进程的通信。 //status:接收操作的状态信息。
-
-
使用通信体communicator:一组进程和一个消息上下文message context
- 进程组:
- 编号从0开始、永不改变成员身份
- 一个进程可以属于多个组,组可以重叠
- 上下文(进程活动环境):私有通信渠道
- 一个通信体发送的消息不会被另一个通信体接受
- 使用隐藏信息tag实现
- 在简单的MPI程序中,所有进程都做相同的事情
- 所有进程构成
MPI_COMM_WORLD - 使用编号rank命名进程
- 所有进程构成
- 进程组:
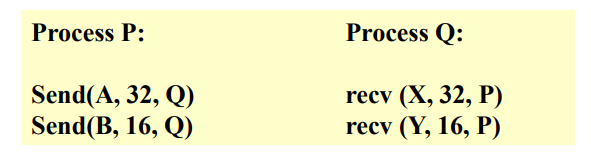
#define TAG 123
double A[10];
MPI_Send(A, 10, MPI_DOUBLE, 1, TAG, MPI_COMM_WORLD);
#define TAG 123
double B[10];
MPI_Recv(B, 10, MPI_DOUBLE, 0, TAG, MPI_COMM_WORLD,
&status)
//or
MPI_Recv(B, 10, MPI_DOUBLE, MPI_ANY_SOURCE,
MPI_ANY_TAG, MPI_COMM_WORLD, &status)
-
MPI数据类型
- 消息传递中的数据以三元组的形式:
(address,count,datatype) - MPI数据类型:
- 预定义类型:
MPI_INT(int)、MPI_DOUBLE(double)、 - 聚合类型:vector向量、struct结构、indexed索引、构建自定义类型
- 预定义类型:
MPI_Pack
int MPI_Pack(const void *inbuf, int incount, MPI_Datatype datatype, void *outbuf, int outsize, int *position, MPI_Comm comm); //inbuf:指向要打包的数据的起始地址。 //incount:要打包的数据元素的数量。 //datatype:数据元素的 MPI 数据类型。 //outbuf:指向用于存储打包数据的缓冲区的起始地址。 //outsize:缓冲区的大小(以字节为单位)。 //position:指向整数的指针,表示当前打包位置的偏移量。在每次调用 MPI_Pack 后,position 的值将更新为下一个可用位置的偏移量。 //comm:通信器。通常使用 MPI_COMM_WORLD 表示所有进程的通信。#include "mpi.h" #include <stdio.h> int main(int argc, char *argv[]) { MPI_Init(&argc, &argv); int rank; MPI_Comm_rank(MPI_COMM_WORLD, &rank); int data[3] = {42, 3, 7}; int position = 0; int buffer_size = 100; // 假设缓冲区大小为100字节 char buffer[buffer_size]; // 打包数据 MPI_Pack(data, 3, MPI_INT, buffer, buffer_size, &position, MPI_COMM_WORLD); if (rank == 0) { // 这里可以发送 buffer 给其他进程 // MPI_Send(buffer, position, MPI_PACKED, ...); printf("Data packed and ready for transmission.\n"); } MPI_Finalize(); return 0; }//数组 A 中的数据打包后发送给目标进程。 //在接收端,相应的可以使用 MPI_Unpack 来解包收到的数据 double A[100]; //使用 MPI_Pack 打包数据时所需的缓冲区大小,将结果存储在 BufferSize 变量中。 //参数 50 表示打包的元素数量,MPI_DOUBLE 表示元素的数据类型, //comm 是通信体。该函数返回的是打包所需的最大缓冲区大小。 MPI_Pack_size (50,MPI_DOUBLE,comm,&BufferSize); //分配了一个临时缓冲区 TempBuffer TempBuffer = malloc(BufferSize); j = sizeof(MPI_DOUBLE); Position = 0; //MPI_Pack 函数用于将数组 A 中的数据逐个元素打包到 TempBuffer 中。 //A + i * j 表示数组中第 i 个元素的地址, //1 表示每次打包一个元素,MPI_DOUBLE 表示元素的数据类型。 for (i=0;i<50;i++) MPI_Pack(A+i*j, 1, MPI_DOUBLE, TempBuffer,BufferSize, &Position, comm); //通过 MPI_Send 将打包后的数据发送给目标进程。 //TempBuffer 是打包后的缓冲区,Position 表示实际打包的数据大小, //MPI_PACKED 表示数据类型是打包后的类型, //destination 是目标进程的rank,tag 是标签,comm 是通信体。 MPI_Send(TempBuffer, Position, MPI_PACKED, destination, tag, comm);-
MPI派生数据类型
-
MPI_Type_contiguous:创建一个由相同数据类型的连续元素MPI_Type_contiguous(int count, MPI_Datatype oldtype, MPI_Datatype *newtype); -
MPI_Type_vector:相同数据类型的块组成的派生数据类型,块之间以一定步幅间隔MPI_Type_vector(int count, int blocklength, int stride, MPI_Datatype oldtype, MPI_Datatype *newtype); -
MPI_Type_struct:由不同数据类型的非连续元素组成MPI_Type_struct(int count, int array_of_blocklengths[], MPI_Aint array_of_displacements[], MPI_Datatype array_of_types[], MPI_Datatype *newtype); -
MPI_Type_indexed:创建一个索引派生数据类型,其中元素以非均匀的偏移量复制MPI_Type_indexed(int count, const int array_of_blocklengths[], const int array_of_displacements[], MPI_Datatype oldtype, MPI_Datatype *newtype); -
MPI_Type_commit:提交一个派生数据类型以供在通信中使用MPI_Type_commit(MPI_Datatype *datatype); -
MPI_Type_free:释放与派生数据类型关联的资源MPI_Type_free(MPI_Datatype *datatype);
double A[100]; MPI_Datatype EvenElements; //··· MPI_Type_vector(50, 1, 2, MPI_DOUBLE,&EvenElements); MPI_Type_commit(&EvenElements); MPI_Send(A, 1, EvenElements, destination, ···); -
- 消息传递中的数据以三元组的形式:
-
MPI标签tag:识别和筛选信息
- 报文发送时带有用户定义的整数标识
- 允许接收进程识别报文
- 接收方指定标签筛选报文,比如
MPI_ANY_TAG
MPI目的地destination:消息发送到的进程rank,有效等级(0…N-1)
MPI源地址source:从源接收的进程报文的等级,
MPI_ANY_SOURCE消息状态message status:标识msg详细信息的数据结构
int recvd_tag, recvd_from, recvd_count; MPI_Status status; //获得status MPI_Recv(..., MPI_ANY_SOURCE, MPI_ANY_TAG, ...,&status ) recvd_tag = status.MPI_TAG; recvd_from = status.MPI_SOURCE; MPI_Get_count( &status, datatype, &recvd_count );summary:点对点MPI用到的MPI函数
MPI_INIT 、 MPI_FINALIZE 、 MPI_COMM_SIZE 、 MPI_COMM_RANK 、 MPI_SEND 、 MPI_RECV 、 MPI_SENDRECV -
阻塞通信:不安全、
无阻塞通信:将通信操作分解
//非阻塞通信函数(如 MPI_Isend、MPI_Irecv)返回一个 MPI_Request 对象, //该对象用于后续等待或测试通信的完成 MPI_Recv(buf, count, type, dest, tag, comm, status)= MPI_Irecv(buf, count, type, dest, tag, comm, &request)+ MPI_Wait(&request, &status) MPI_Send(buf, count, type, dest, tag, comm)= MPI_Isend(buf, count, type, dest, tag, comm, &request)+ MPI_Wait(&request, &status)#define MYTAG 123 #define WORLD MPI_COMM_WORLD MPI_Request request; MPI_Status status; Process 0 and 1: MPI_Irecv(B, 100, MPI_DOUBLE, 1, MYTAG, WORLD, &request); MPI_Send(A, 100, MPI_DOUBLE, 1, MYTAG, WORLD); MPI_Wait(&request, &status); p=1-me; Process 0 and 1: MPI_Isend(A, 100, MPI_DOUBLE, p, MYTAG, WORLD, &request); MPI_Recv(B, 100, MPI_DOUBLE, p, MYTAG, WORLD, &status); MPI_Wait(&request, &status);
集成通信
collectve communication
- 通行体中的所有进程都参与、所有进程开始前进程可能不会结束
- 功能:通信(组间通信)、同步(同步组内进程)、计算(对组数据操作)
集中通信方法
-
MPI_Barrier:同步原语,在所有参与通信的进程之间创建一个同步点。-
进程调用
MPI_Barrier函数时,它将等待,直到所有其他参与通信的进程也调用了MPI_Barrierint MPI_Barrier(MPI_Comm comm); //通常使用 MPI_COMM_WORLD 表示全局通信
-
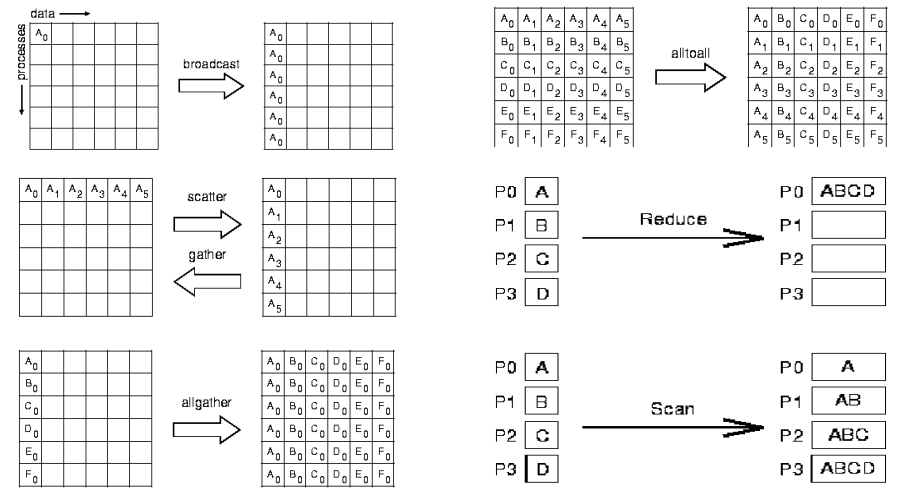
-
MPI_Bcast:广播操作,将一份数据从一个进程传输到所有其他进程。int MPI_Bcast(void *buffer, int count, MPI_Datatype datatype, int root, MPI_Comm comm); //void *buffer:指向要广播的数据的缓冲区的指针。 //int count:要广播的数据元素的数量。 //MPI_Datatype datatype:数据元素的 MPI 数据类型。 //int root:广播的根进程的排名(根进程拥有要广播的数据)。 //MPI_Comm comm:通信体,通常使用 MPI_COMM_WORLD 表示全局通信int rank, size, data; MPI_Comm_rank(MPI_COMM_WORLD, &rank); MPI_Comm_size(MPI_COMM_WORLD, &size); if (rank == 0) { // 根进程拥有数据 data = 42; } // 使用 MPI_Bcast 将数据广播到所有进程 MPI_Bcast(&data, 1, MPI_INT, 0, MPI_COMM_WORLD);所有进程必须参与
-
MPI_Reduce:归约操作,将每个进程的部分结果合并为一个全局结果。通常用于执行全局约简(global reduction)int MPI_Reduce(const void *sendbuf, void *recvbuf, int count, MPI_Datatype datatype, MPI_Op op, int root, MPI_Comm comm); //const void *sendbuf:发送缓冲区的指针,包含每个进程的局部结果。 //void *recvbuf:接收缓冲区的指针,用于存储全局结果。 //在根进程上,它将包含最终的全局结果。 //int count:每个进程的元素数量。 //MPI_Datatype datatype:数据元素的 MPI 数据类型。 //MPI_Op op:归约操作,例如 MPI_SUM、MPI_PROD、MPI_MAX、MPI_MIN 等。 //int root:根进程的排名,即具有最终结果的进程。 //MPI_Comm comm:通信体,通常使用 MPI_COMM_WORLD 表示全局通信。int rank, size, local_data = 42, global_sum; MPI_Comm_rank(MPI_COMM_WORLD, &rank); MPI_Comm_size(MPI_COMM_WORLD, &size); // 使用 MPI_Reduce 对局部数据求和 MPI_Reduce(&local_data, &global_sum, 1, MPI_INT, MPI_SUM, 0, MPI_COMM_WORLD); if (rank == 0) { // 根进程打印全局求和结果 printf("Global sum: %d\n", global_sum); }点积的例子
/* distribute two vectors over all processes such that processor 0 has elements 0...99 processor 1 has elements 100...199 processor 2 has elements 200...299 etc. */ double dotprod(double a[100], double b[100]) { double gresult = lresult = 0.0; integer i; /* compute local dot product */ for (i = 0; i < 100; i++) lresult += a[i]*b[i]; MPI_Allreduce(lresult, gresult, 1, MPI_DOUBLE, MPI_SUM, MPI_COMM_WORLD); return(gresult); } -
MPI_Alltoall:集体通信操作,在一组进程之间交换数据。MPI_Alltoall使每个进程都将自己的数据发送到所有其他进程,并从所有其他进程接收数据。int MPI_Alltoall(const void *sendbuf, int sendcount, MPI_Datatype sendtype, void *recvbuf, int recvcount, MPI_Datatype recvtype, MPI_Comm comm); //const void *sendbuf:发送缓冲区的指针,包含每个进程要发送的数据。 //int sendcount:每个进程发送的数据元素数量。 //MPI_Datatype sendtype:发送数据元素的 MPI 数据类型。 //void *recvbuf:接收缓冲区的指针,用于存储从所有其他进程接收到的数据。 //int recvcount:每个进程接收的数据元素数量。 //MPI_Datatype recvtype:接收数据元素的 MPI 数据类型。 //MPI_Comm comm:通信体,通常使用 MPI_COMM_WORLD 表示全局通信。 //数据交换: 当每个进程都有一部分数据,将这些数据分发给所有其他进程时, //数据重组: 重新组织数据以便在不同进程之间进行交互。MPI_Init(&argc, &argv); int rank, size; MPI_Comm_rank(MPI_COMM_WORLD, &rank); MPI_Comm_size(MPI_COMM_WORLD, &size); // 假设每个进程有一个整数数组,包含rank个元素 int send_data[size]; for (int i = 0; i < size; ++i) { send_data[i] = rank; } // 接收数据的缓冲区 int recv_data[size]; // 使用 MPI_Alltoall 进行数据交换 MPI_Alltoall(send_data, 1, MPI_INT, recv_data, 1, MPI_INT, MPI_COMM_WORLD); // 打印每个进程接收到的数据 printf("Process %d received data:", rank); for (int i = 0; i < size; ++i) { printf(" %d", recv_data[i]); } printf("\n"); MPI_Finalize(); -
MPI_Gather/Gatherv/Allgather/Allgatherv:将每个进程的局部数据收集到一个进程中 -
MPI_Scatter/Scatterv:从一个进程中将数据分发给所有其他进程 -
MPI_Reduce_scatter:一组进程中进行数据的局部归约,然后将结果分发给每个进程 -
MPI_Scan:在一组进程中执行扫描(prefix sum)操作,即计算累积和,并将结果分发给每个进程
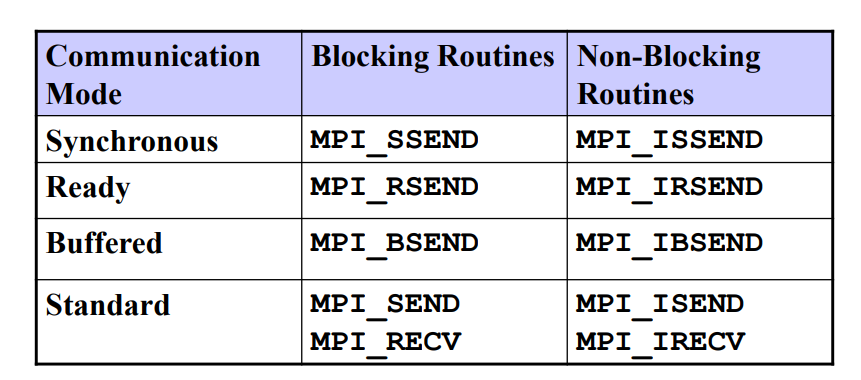
MPI通信模式
消息的发送和接收方式,缓冲区的管理,以及进程之间的同步
-
synchronous同步:最安全
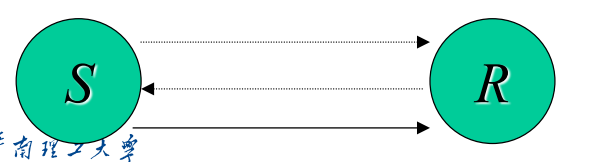
- 等待接收者准备好,才发送
- 同步发送方和接收方,没有接收方就会死锁
MPI_Ssend和MPI_SRecv
-
buffered缓冲:将send和recv解耦
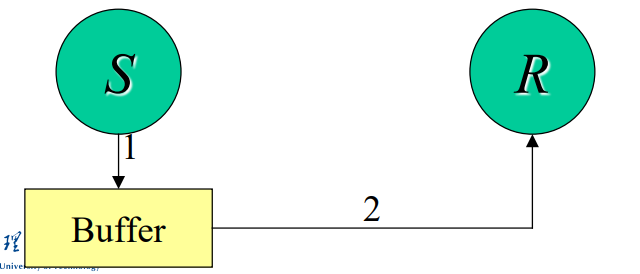
- 无需等待接收者准备好,消息缓存并立刻返回
- 需要明确附加缓冲空间
MPI_Bsend和MPI_Recv非阻塞
-
standard标准:适应大多数情况
- 信息发送后立即完成,可能收到也可能没收到
- MPI决定是否缓冲
MPI_Send和MPI_Recv阻塞
-
ready就绪:总开销最低
- 在发送端假设接收者已经准备好接收消息。
- 与同步模式不同,就绪模式不进行等待,而是立即返回。
MPI_Rsend和MPI_Recv
MPI编程样例——PI
//积分法计算圆周率
#include "mpi.h"
#include <stdio.h>
#include <math.h>
int main(argc,argv)
int argc;
char *argv[];
{
int done = 0, n, myid, numprocs, i, namelen;
char processor_name[MPI_MAX_PROCESSOR_NAME];
double PI25DT = 3.141592653589793238462643;
double mypi, pi, h, sum, x;
MPI_Init(&argc,&argv);
MPI_Comm_size(MPI_COMM_WORLD,&numprocs);
MPI_Comm_rank(MPI_COMM_WORLD,&myid);
MPI_Get_processor_name(processor_name, &namelen);
while (!done)
{
if (myid == 0) {
printf("Enter the number of intervals: (0 quits) ");
scanf("%d",&n);
}
MPI_Bcast(&n, 1, MPI_INT, 0, MPI_COMM_WORLD);
printf("Rank %d / %d @ %s\n", myid, numprocs, processor_name);
if (n == 0) break;
h = 1.0 / (double) n;
sum = 0.0;
for (i = myid; i <= n; i += numprocs) {
x = h * ((double)i + 0.5);
sum += 4.0 / (1.0 + x*x);
}
mypi = h * sum;
MPI_Reduce(&mypi, &pi, 1, MPI_DOUBLE, MPI_SUM, 0,
MPI_COMM_WORLD);
if (myid == 0)
printf("pi is approximately %.16f, Error is %.16f\n",
pi, fabs(pi - PI25DT));
}
MPI_Finalize();
return 0;
}
//Cannon算法的矩阵乘法,只有伪代码,参考前面
云计算服务类型三种
云计算服务通常被分为三种基本类型:基础设施即服务(LaaS),平台即服务(PaaS),和软件即服务(SaaS)。每种服务类型提供不同级别的控制、灵活性和管理,满足不同用户和业务的需求。下面是对这三种服务的详细介绍:
基础、平台、软件
- 计算、存储、网络
- 数据库、应用程序、开发程序
- 应用程序
- 基础设施即服务(IaaS):
- IaaS 提供虚拟化的计算资源作为服务。这包括了虚拟机、存储空间、网络等基础计算资源。
- 用户通过IaaS可以获得对底层基础设施的高度控制,比如选择操作系统、安装应用程序和直接访问服务器的配置。
- 示例:Amazon Web Services (AWS) EC2, Google Compute Engine (GCE), Microsoft Azure VMs。
- 平台即服务(PaaS):
- PaaS 提供了一套工具和服务,使开发人员能够在云中构建、测试和部署软件应用。
- 它抽象了底层基础设施的复杂性,并提供了数据库管理、应用程序托管、开发工具等服务。
- 用户无需管理或控制基础设施(如服务器和网络),但可以控制部署的应用程序和可能的应用托管环境配置。
- 示例:Google App Engine, AWS Elastic Beanstalk, Heroku。
- 软件即服务(SaaS):
- SaaS 提供基于云的应用程序给最终用户。这些应用通常通过网络(通常是浏览器)访问。
- 用户不需要安装或维护任何软件,因为应用完全由服务提供商托管和维护。
- SaaS 应用范围广泛,包括电子邮件、协作工具、客户关系管理(CRM)系统等。
- 示例:Google Workspace, Microsoft Office 365, Salesforce。
这三种服务类型共同构成了云计算的主要架构,它们之间的主要区别在于用户对资源的控制程度和管理复杂性。用户可以根据自己的需求和专业能力选择最合适的云服务类型。
第七讲wordcount map和reducer
虚拟化云计算概念
虚拟化是云计算中的一个核心概念,它指的是使用软件来模拟硬件功能,创建一个虚拟的计算环境。在云计算中,虚拟化技术允许多个虚拟机(VMs)在单个物理硬件资源上运行,每个虚拟机都可以运行自己的操作系统和应用程序。这种技术对于云计算的灵活性、可扩展性和资源优化至关重要。以下是虚拟化在云计算中的一些关键方面:
- 资源隔离:
- 虚拟化使得每个虚拟机都在一个隔离的环境中运行,从而确保了不同客户之间的安全和隐私。每个虚拟机都相当于一个独立的物理服务器。
- 资源共享和优化:
- 通过虚拟化,可以更有效地利用物理服务器的计算能力、存储和网络资源。这减少了资源的浪费,提高了整体的效率。
- 灵活性和快速部署:
- 虚拟机可以迅速被创建、复制、迁移和销毁,这为云服务提供了极高的灵活性。用户可以快速地扩展或缩减资源,以适应不同的工作负载需求。
- 硬件抽象:
- 虚拟化技术通过隐藏底层硬件的复杂性,为用户提供了一个简单且一致的操作界面。用户不需要关心物理硬件的具体配置,就可以部署和运行应用。
- 支持多种操作系统和环境:
- 在同一个物理服务器上,可以运行不同操作系统的多个虚拟机。这对于兼容性测试、跨平台应用开发等场景非常有用。
- 成本效益:
- 由于虚拟化可以提高资源利用率,它有助于降低硬件投资和运维成本。同时,用户根据实际使用情况付费,进一步降低了成本。
虚拟化技术是现代云计算平台的基石,它使得云服务能够提供弹性、按需的资源分配,满足各种规模和类型用户的需求。
资源隔离、资源共享、硬件抽象、多环境、灵活快速、成本效益
考点
第二讲 10~22 网络特性对比表
第三讲 3~37 内存体系结构表
第四讲 46~76性能评价 27~32 logP
第五讲 81~ PCAM划分通信组合映射
第六讲 矩阵乘法 Cannon DNS
第七讲 openmp编程 手写算pi
第八讲 各种通信
云计算服务类型三种 IAAS PAAS SAAAS
第七讲wordcount map和reducer
虚拟化云计算概念
选择、答题:代码openmp和mpi、简答