考点
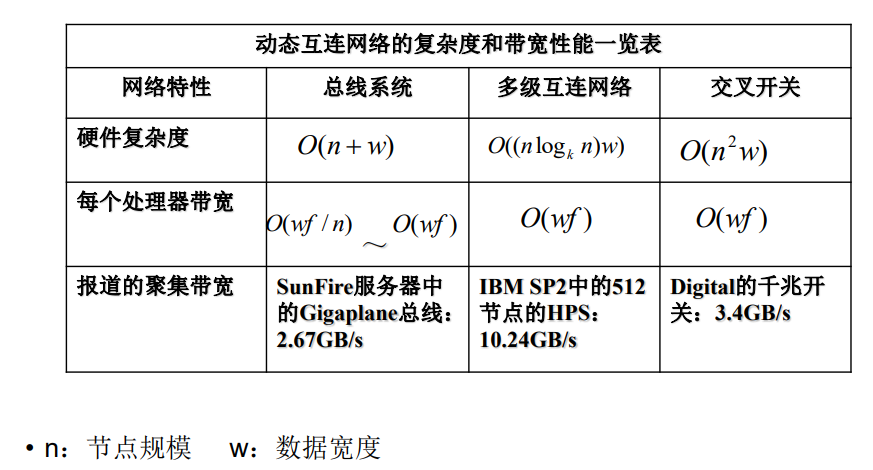
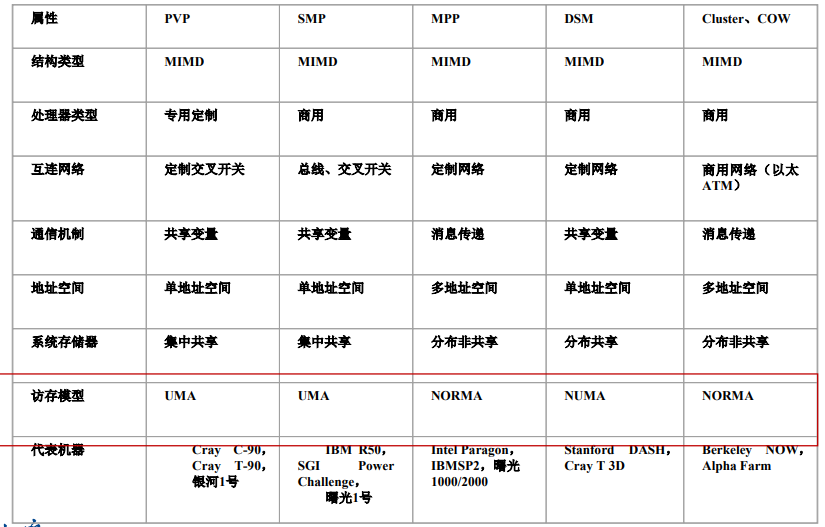
第二讲 10~22 网络特性对比表
第三讲 3~37 内存体系结构表
第四讲 46~76性能评价 27~32 logP
第五讲 81~ PCAM划分通信组合映射
第六讲 矩阵乘法 Cannon DNS
第七讲 openmp编程 手写算pi
第八讲 各种通信
云计算服务类型三种 IAAS PAAS SAAAS
第七讲wordcount map和reducer
虚拟化云计算概念
选择、答题:代码openmp和mpi、简答
并行计算概述
应用场景:计算能力、存储效率、网络IO、时间延迟
并行计算机的发展
什么是并行计算
-
并行计算:高性能计算(high performance computin)、超级计算(super computing)
大任务--(分解)-->多个子任务--(分给)-->不同处理单元--(协同合作)-->快速求解 -
基本条件(硬件、算法、环境)
- 硬件(并行机):多态处理机互联网络连接通信
- 并行算法设计
- 并行编程环境
-
主要目标:提高求解速度、扩大问题规模(又快又大)
并行计算vs分布式计算
- 分布式计算distributed computing:多个处理机执行相互依赖的不同应用,协调资源访问
- 并行计算parallel computing:提高求解同一个应用的速度、扩大求解同一个应用的问题规模
- 并行和分布式相互配合,分布式协调不同应用关系,并行提高求解单应用能力
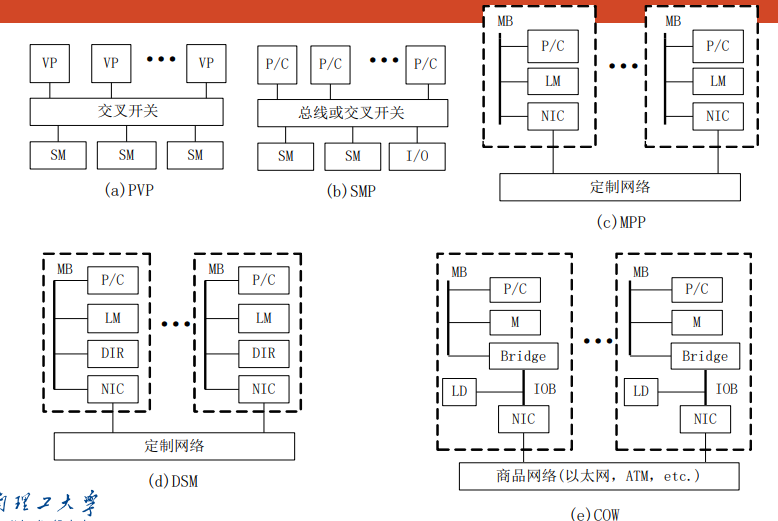
HPC硬件平台架构
并行计算体系结构(1)
并行计算网络概述
-
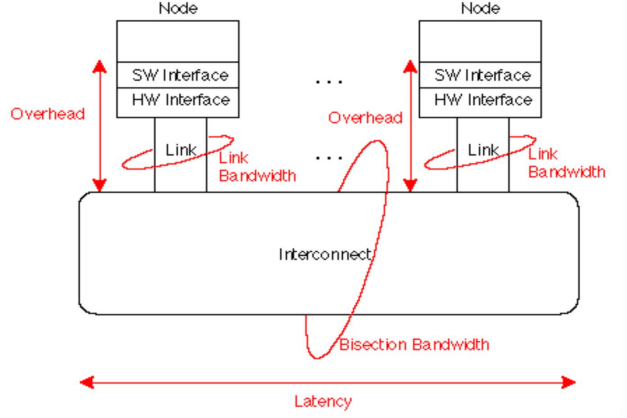
并行计算机网络性能指标:
- 节点度node degree:射入或射出一个结点的边数
- 网络直径network diametert:网络中任何两个节点之间的最长距离(最大路径数,越小越好)
- 对剖宽度bisection width:对分网络成两半移去的最少边数(最大流最小割,越大越稳定)
- 网络是对称symmetry的:从任一节点观看网络都一样
- 对剖带宽bisection width:最小对剖平面的最大数据带宽(bps或Bps,越高越好)
- 网络规模:网络节点(CPU)总数
-
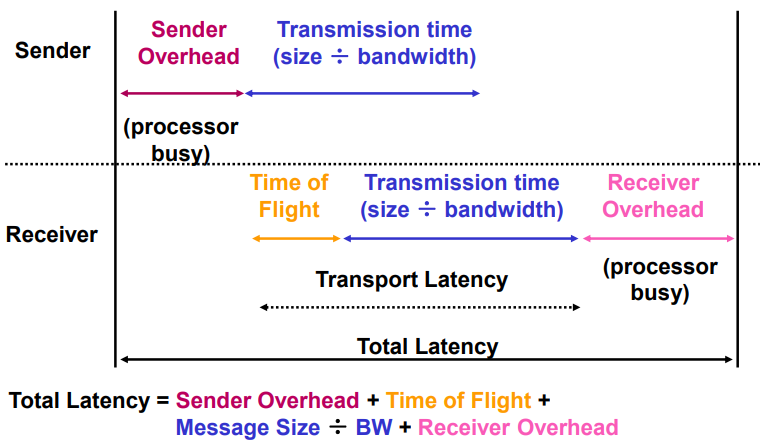
$total_latency=sender_overhead+time_of_flight+message_size/BW+receiver_overhead$
- overhead:接口延迟
- latency:网络
静态互联网络
-
定义:处理单元之间固定连接的网络,点到点连接保持不变
-
静态网络:
-
一维线性阵列:最简单最基本,左右近邻连接(二近邻连接)
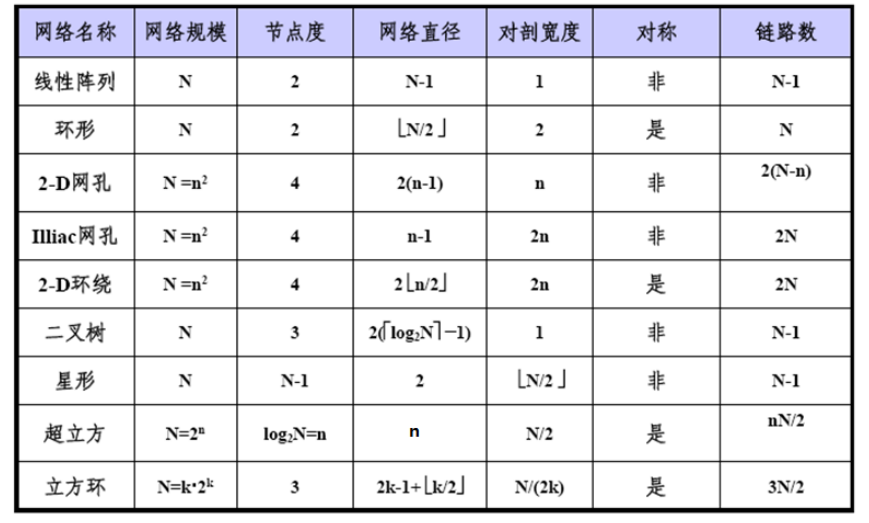
- $N$个节点,$N-1$条边,内节点度$2$,直径为$N-1$,对剖宽度为$1$
- 首尾相连,构成循环移位器(环),可以单向或双向
- 节点度$2$,直径为$\lfloor N/2\rfloor$(双向环)或$N-1$(单向环),对剖宽度$2$
-
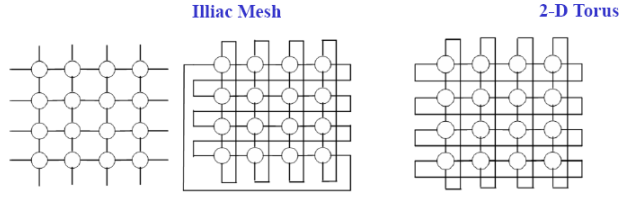
二维网孔 2-D mesh:每个节点和上下左右节点近邻连接(边界除外)
- 网络规模:$N$,节点度$4$,网络直径$2(N^{1/2}-1)$,对剖宽度$N^{1/2}$
- illiac网孔:垂直方向上带环绕,水平方向蛇状连接
- 网络规模:$N$,节点度$4$,网络直径$N^{1/2}-1$,对剖宽度$2N^{1/2}$
- 2-D环绕:垂直和水平都带环绕
- 网络规模:$N$,节点度$4$,网络直径$2\lfloor N^{1/2}/2)\rfloor$,对剖宽度$2N^{1/2}$
-
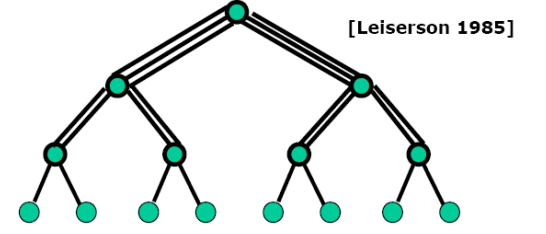
二叉树:
-
节点度:$3$,对剖宽度:$1$,树的直径:$2*k-2=2(\lceil log_2N\rceil -1)$
-
星形网络:节点度$N-1$,直径$2$,对剖宽度$\lfloor N/2\rfloor$
-
叶节点对应并行机的节点,内节点负责叶节点之间的通信
-
网络直径$2logP$有利于全局通信,对剖宽度$1$不利于大数据量通信
-
胖树:通路从叶节点向根节点逐渐变宽,解决通信带宽瓶颈
-
-
-
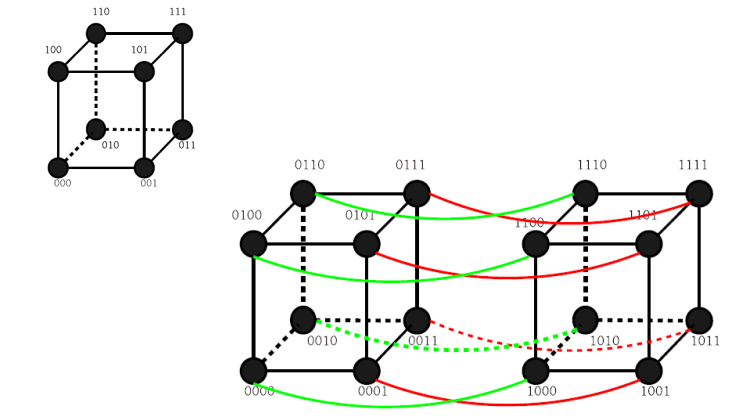
超立方:
-
节点用n位0-1编码,两个节点编号数码不同位数表示两节点的距离
-
节点度:$d$,不利于增加并行机规模,一般$d<5$
-
网络直径:$d$,对剖宽度:$2^{d-1}$,性质很好
- 3-D 环绕:3d超立方+2-D环绕
-
k-立方环:以环代替顶点,$N=k2^k,d=k$
-
-
动态互联网络
-
定义:节点之间无固定物理连接,交叉点处用电子开关、路由器、仲裁器提供动态连接
-
多处理及总线系统的主要问题:
- 总线仲裁、中断处理、协议转换、快速同步、高速缓存一致性协议、分事务、 总线桥、层次总线扩展
-
单一总线
- 连接处理器、存储、IO
- 公用总线,以时钟为一个周期,分时占有
- $总线带宽=总线主频总线宽度,1.2GB/s=150MHz64b$
- 采用公平的监听协议和仲裁算法
-
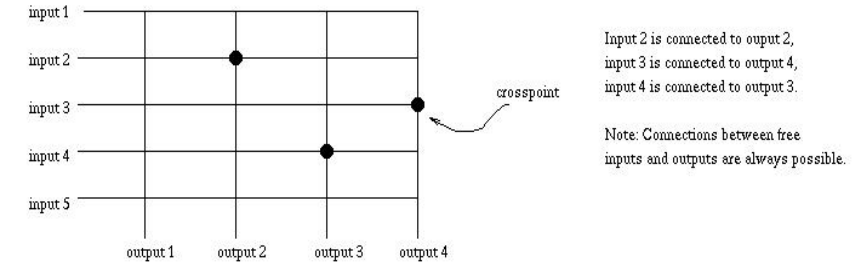
交叉开关
-
所有节点通过交叉开关阵列连接,每个开关为两个节点的专用通路
-
构成$N\times N$阵列,最多只能连通$N$对节点,提供$2N$个端口
-
一端连接处理器,一端连接存储器,只允许一对一或一对多的映射,防止冲突
-
单级交换网络:提供更高的带宽
-
-
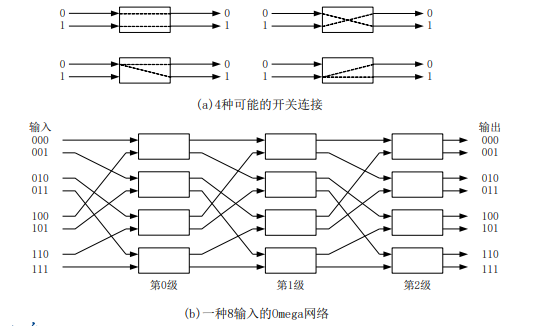
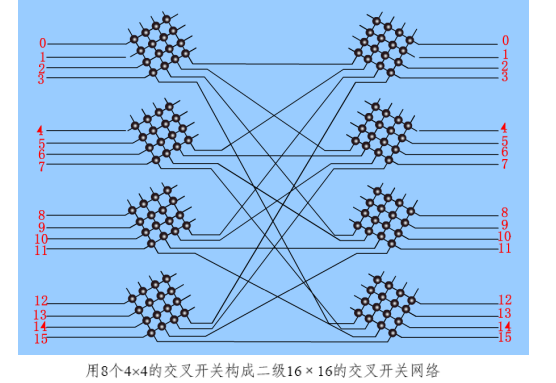
多级互联网络
-
多级互联网络multistage interconnection network:单级交叉开关级联
-
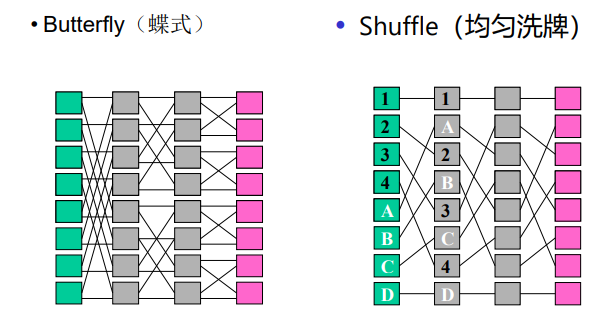
均匀洗牌
-
蝶网
-
多路均匀洗牌
-
交叉开关
-
立方连接
-
标准实现
-
Myrinet
-
HiPPI
-
Scalable Coherent Interface(SCI)
-
QsNet
-
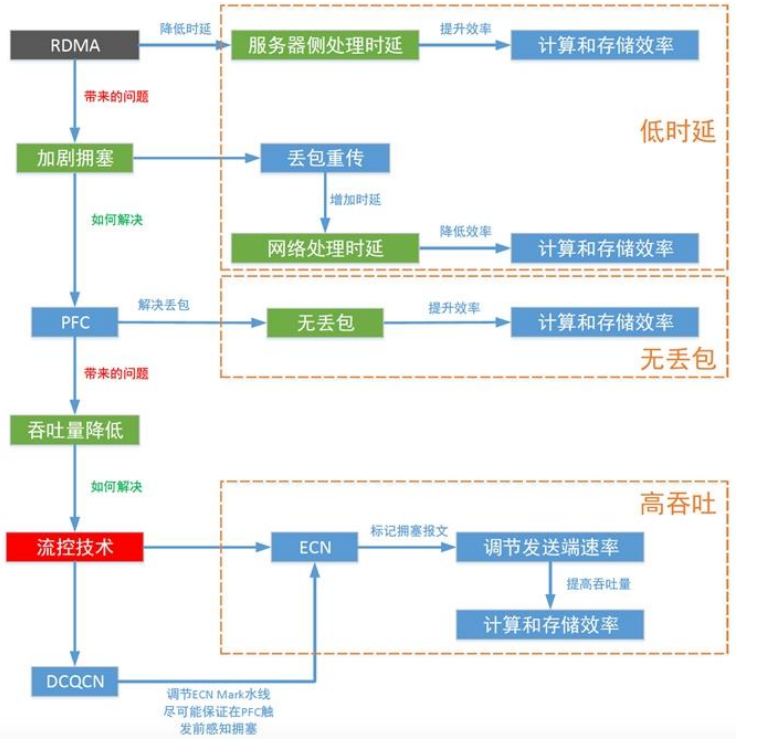
RDMA(remote direct memory access):直接内存间进行数据互传的技术,降低cpu消耗,低时延
-
RoCE、iWARP,基于以太网的RDMA技术
- 基于TCP的RDMA,将”无损“寄托在TCP的可靠性上
- 而基于RoCEv2的无损网络,将”无损“放在流控机制上
-
Infiband:专门为RDMA设计的网络,硬件级别可靠传输
-
-
HPC网络:AI Fabric的目标,无丢包、低时延、高吞吐
并行计算体系结构(2)
Flynn分类
指令流/数据流分类法:flynn分类法
- 指令流 instruction stream:指令序列
- 数据流 data stream:输入数据和中间结果
- 多倍性 multiplicity:系统性能瓶颈上同时处于同一执行阶段的指令和数据的最大可能个数
计算机系统按照flynn分类分为:
-
单指令单数据流SISD系统:单处理器,指令串行
-
单指令多数据流SIMD系统:单一指令控制多个处理单元,处理多个数据流
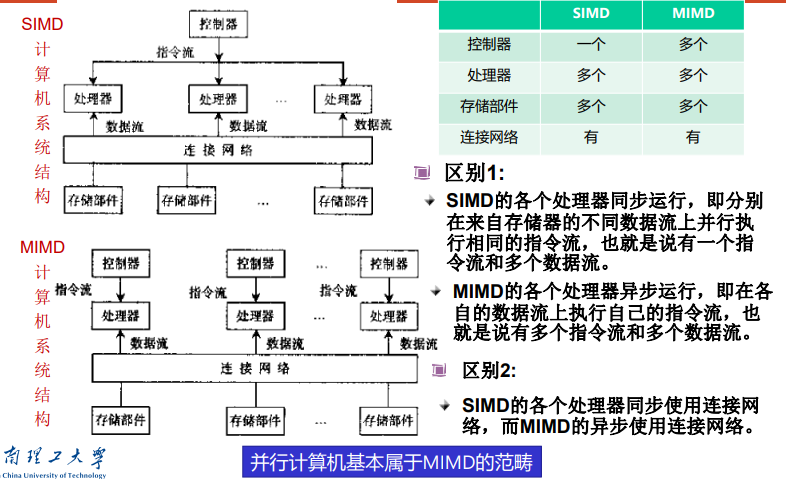
- 系统结构:一个控制器、多个处理器、存储模块、互联总线
- 代码举例:
- 原理:支持将数据打包在大型寄存器中进行处理的指令集,适合数据密集型操作
- 使用方法:编译器自动向量化优化,改写循环体
-
多指令单数据流MISD系统:多个指令同时处理同一数据流
-
多指令多数据流MIMD系统:多处理机系统
-
MIMD和SIMD 的区别:处理器异步vs同步,连接网络使用异步vs同步
-
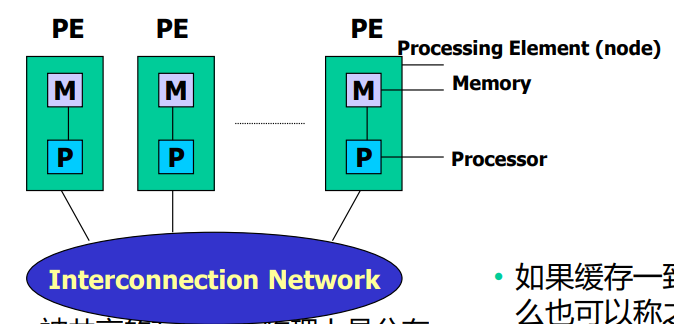
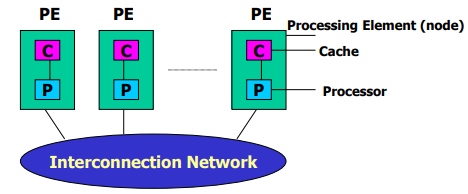
内存访问模型
- 组成要素:处理器processor、互联网络interconnect network,内存memory
- 并行机基本特征:多个计算单元和存储模块,通过互联网络耦合
- 紧耦合和松耦合
-
共享内存vs分布式内存
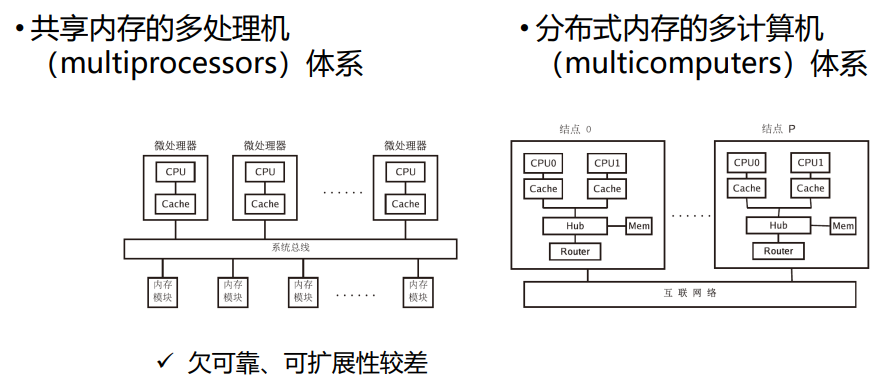
共享内存
- 紧密耦合多处理器,所有处理器都可以访问的全局物理内存
- 对称性:系统中任何处理器都可以访问任何内存单元、IO设备
- 单地址空间
- 低通信延迟:处理器通过共享内存数据交换
- 高速缓存机器一致性:多级高速缓存支持数据局部性,硬件增强一致性
分布式内存
-
UMA(uniform memory access)均匀存储访问模型
-
特点:
- memory被所有processor均匀共享
- 所有processor访问任何存储字去相同时间
- 每个processor有私有cache
- IO以一定形式共享
- 访存竞争时,仲裁策略平等对待每个节点
-
对称多处理symmetric multiprocessing,SMP:微处理器和高速缓存
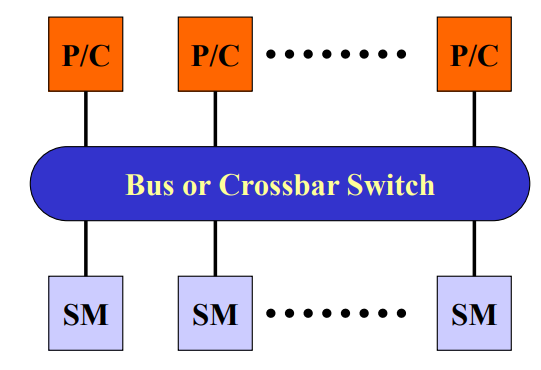
- memory和processor对称分布在interconnect network两侧
- 特点:
- 对称共享存储:任何processor可以直接访问memory和IO,统一编址,仲裁公平
- 单一的操作系统映像:全系统只有一个os驻留在SM中,根据processor的负载,动态分配进程到processor,保持处理器负载均衡
- 局部高速缓存cache和数据一致性:每个processor都有局部cache,cache数据和SM数据一致
- 低通信延迟:处理器通信通过读写os提供的SM缓存区,延迟小于网络通信
- 共享总线带宽
- 支持消息传递、共享存储、并行程序设计
-
并行向量处理机parallel vector processor,PVP:高性能向量处理器VP
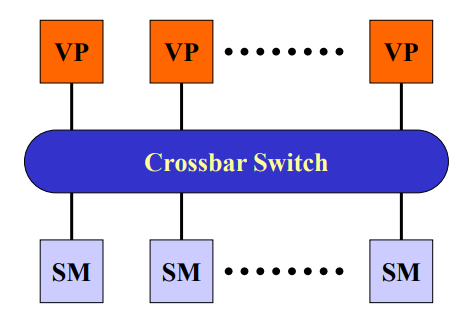
-
-
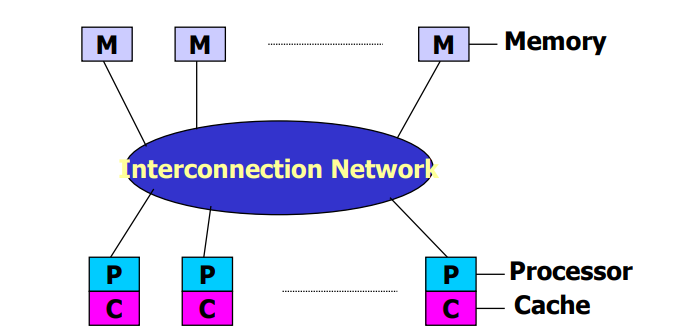
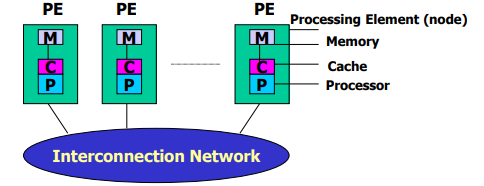
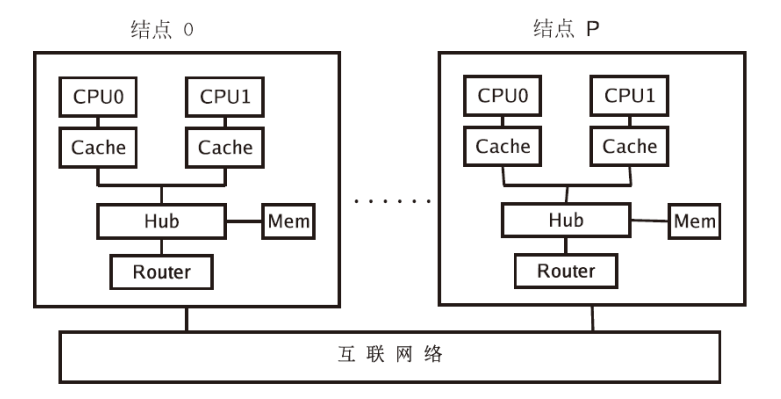
NUMA(non-uniform memory access)非均匀存储访问模型
-
被共享的memory在物理上分布在各自的processor中,所有本地memory的集合组成全局地址空间
-
processor访问memory时间不一样,有私有chache
- 缓存一致性得到维护,CC-NUMA
- 缓存一致性无法维护,NCC–NUMA
-
DSM distributed shared memory
-
内存模块在各个节点内部,被所有节点共享
-
和SMP的相同点
- 单一os
- 基于cache的数据一致性
- 低通信延迟,高通信带宽
- 支持消息传递、共享存储并行程序设计
-
物理上分布存储:
内存模块分布在各个节点中,通过高性能互联网络连接,避免SMP访存总线的带宽瓶颈
-
单一的内存地址空间
-
非一致内存访问NUMA模式:远端访问通过网络,比本地访问慢3倍以上
-
-
-
COMA(cache-only memory access)全高速缓存存储访问
- 没有存储层次结构,所有节点的cahce构成全局地址空间
-
CC-NUMA(coherent-cahce nonuniform memory access)高速缓存一致性非均匀存储访问模型
-
和SMP结构一样,易于编程,可扩放性
-
系统硬件软件自动在各节点分配数据,保持一致性,无需程序员参与
-
-
NORMA(noremote memory access):非远程存储访问模型
-
分布式内存系统中处理器有各自的内部寄存器
-
一个核的内存地址对其他核不可见,对于所有CPU没有单一全局地址空间
-
优点
- 内存大小和CPU数量等比例增加
- 访问自己的内存,无冲突、无维护缓存一致性的开销
-
缺点:
- 程序员参与processor之间数据通信细节
- 在基于全局内存空间的数据结构上,建立分布式内存管理映射困难
- 由于非一致性的内存访问,访问远程节点时间更长
-
大规模并行处理机massively parallel processor,MPP(NORMA)
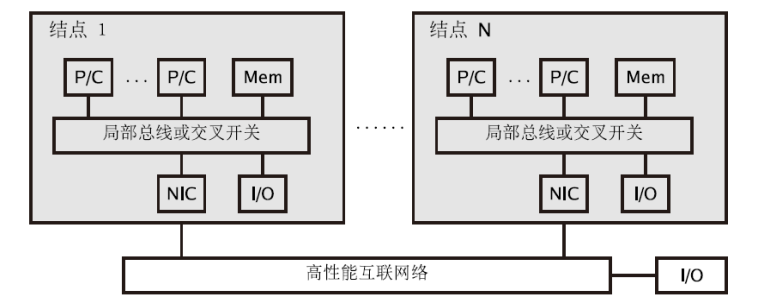
- 每个节点相对独立,有多个微处理器、局部cache、独立的操作系统映像、独立编址
- 节点间用局部高性能网卡NIC互联,仅支持消息传递或高性能Fortran并行程序设计,不支持全局共享的OpenMP并行设计
-
集群/机群 cluster、COW
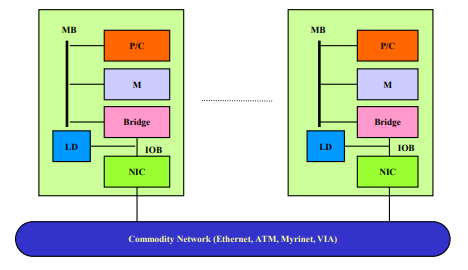
- 松耦合、分布式存储
- 优点:系统结构灵活、性价比高,缺点:通信性能、并行编程环境
-
MPP vs Cluster
- cluster有完整的os,MPP只有微内核
- cluster有本地磁盘,MPP没有
- cluster节点连接到IO总线上(松耦合),MPP节点连接到存储总线上(紧耦合)

-
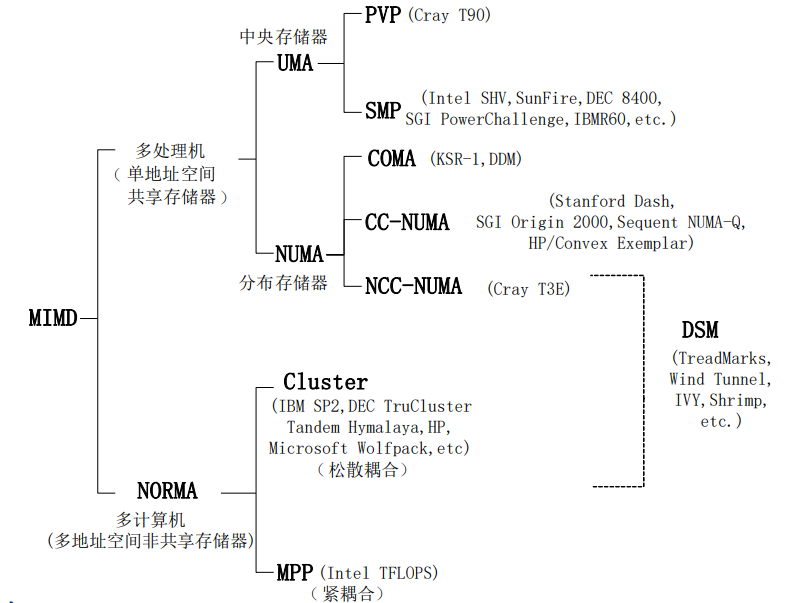
- 实例:SGI Origin2000(CC-NUMA)、Blue Gene(MPP)、Roadrunner(Cluster)
内存体系结构
-
存储层次
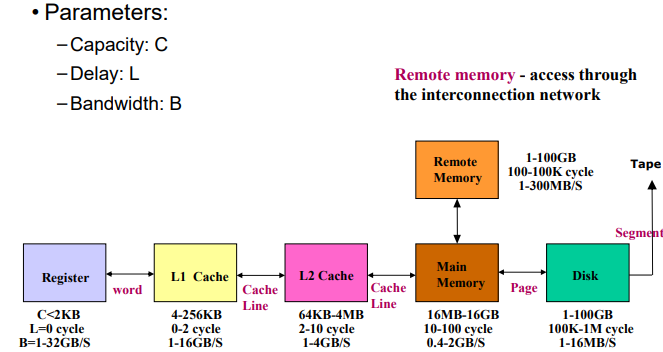
-
cache类别:L2在节点内部,L1在处理器内部(连接寄存器和L2 cache)
-
编写高性能并行程序解决方案
-
cache的映射策略
- 以cache线(line)为基本存储单位,包含$L$个字,$L\times 8$个字节 内存以块(block)为基本存储单位,包含$L$个字,$L\times 8$个字节
-
for(int i=0; i < M; i++) { a(i) = a(i) + 5.0 * b(i); }有无cache的访存次数分别为$2M/L, 2M$ - 直接映射策略,k-路组关联映射策略,全关联映射策略
- cache线置换策略
- LRU,last recently used,没使用时间最长
- FIFO
- LFU,least frequently used,使用频率最低
- 随机算法
- cache数据一致性策略
- write-through策略:cache线数据一旦被修改,立刻写回内存块,增加了访存次数
- write-back策略:当且仅当cache线被置换、或外部请求访存,将cache线写回内存
-
-
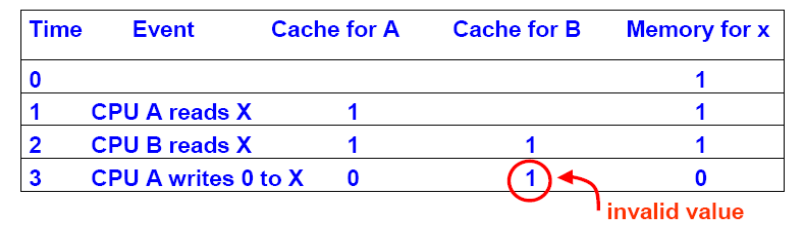
一致性包括cache一致性和存储一致性
-
cache一致性:私有cache副本数据和共享memory数据的一致性
- 特征:多处理器对同一memory单元操作
- 原因:cache写回更新策略引起
-
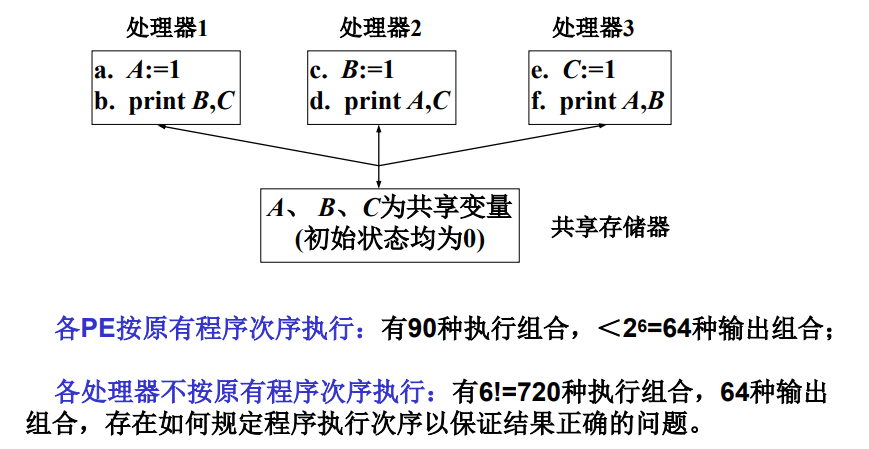
memory一致性:多处理器程序执行次序和共享memory存取次序间的一致性
- 特征:多处理器对不同memory单元操作
- 原因:处理器内部优化执行效率(异步流水线)引起
-
-
cache一致性协议
- 总线监听一致性协议:每个Cache块设有状态,各节点监听总线上的总线事务、并根据Cache块 状态控制(基于作废/更新)其状态变化(状态转换图)
- 目录一致性协议:在每个宿主共享存储器单元(块)上建立一个目录,记录使用该单元的所有处理器(Cache)信息和数据状态信息,宿主节点根据这些信息实现(基于作废/更新)各 Cache的一致性。
- 一致性协议性能参数:扑空率、更新速率、流量
- 影响因素:cache容量、块大小、一致性粒度
-
节点内部或节点之间的内存访问模式
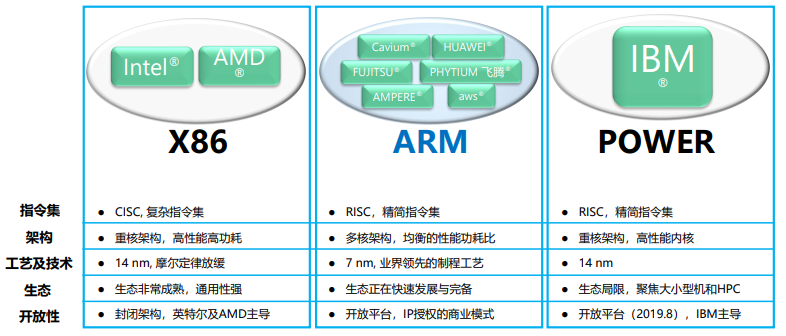
处理器、协处理器与异构计算
并行计算模型及性能评测
并行计算模型:将并行计算机的基本特征抽象出来,形成一个抽象的计算模型,作为并行算法分析、设计、性能预测的基础
强调的是计算模型
PRAM模型
-
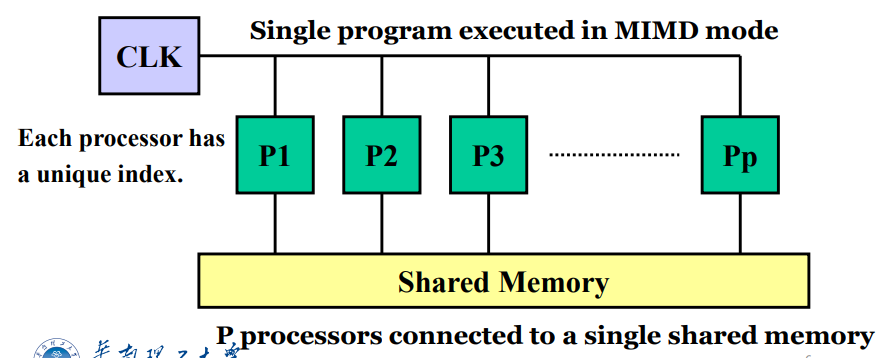
概念:SIMD-SM模型,一个指令控制器和一个共享memory,通过SM的R/W交换数据,隐式同步计算
-
分类:exclusive(独立)、concurrent(同步)
- PRAM-CRCW并发读并发写:最高效单需要解决冲突
- CPRAM-CRCW(common PRAM-CRCW),仅允许写入相同的数据
- PPRAM-CRCW(priority PRAM-CRCW),仅允许优先级最高的处理器写入
- PRAM-CREW并发读互斥写:默认
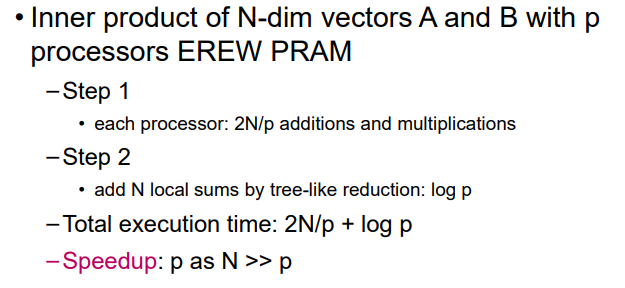
- PRAM-EREW互斥读互斥写:最低效最现实
- 计算能力:PRAM-EREW可以$logp$倍模拟PRAM-CREW和PRAM-CRCW
- $T_{EREW}\ge T_{CREW}\ge T_{CRCW}$
- $T_{EREW}=O(T_{CREW}\cdot logp)=O(T_{CRCW}\cdot logp)$
- PRAM-CRCW并发读并发写:最高效单需要解决冲突
-
例子
- 序列递归求和
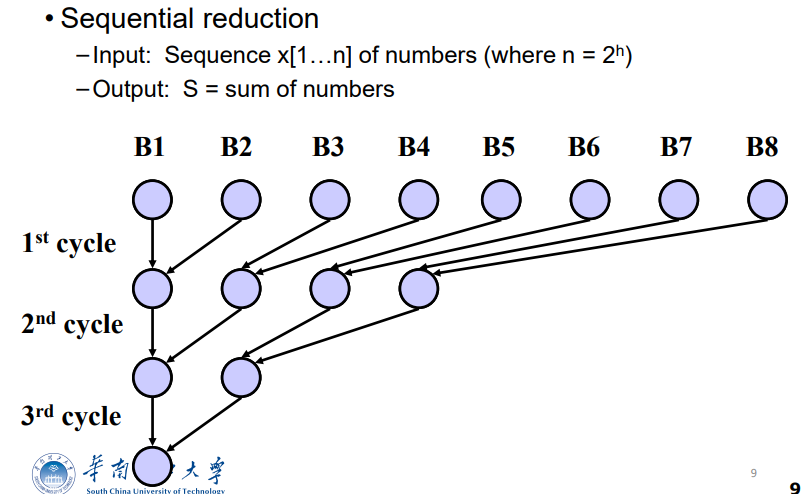
PEREW机器时间复杂度$O(logn)$?
- 向量内积
-
优点:适合并行算法表示和复杂性分析,易于使用,隐藏了并行机通讯、同步细节
缺点:不适合MIMD并行机,忽略了SM竞争、通讯延迟因素
-
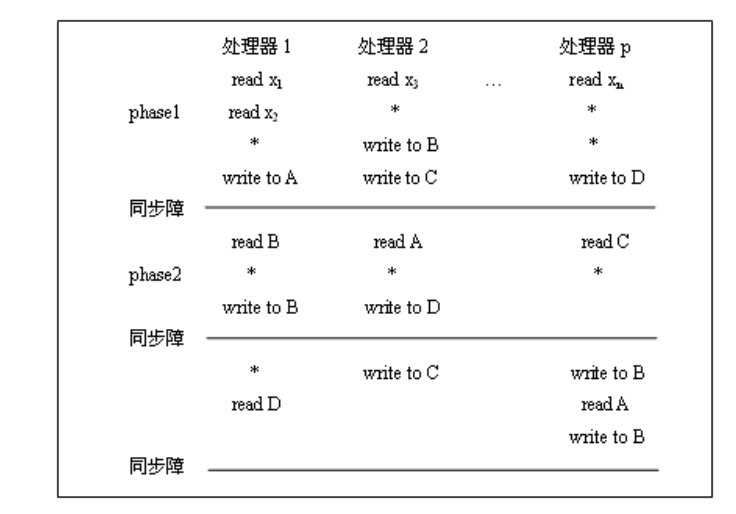
异步APRAM模型
-
基本概念:phase分相 PRAM或MIMD-SM 每个处理器有局部的存储器、时钟、程序,无全局时钟,处理器异步执行 处理器通过SM通信,需要在并行程序中显式地加入同步路障
-
指令类型:全局读、全局写、局部操作、同步
-
计算过程:由同步障分开的全局phase组成
-
计算时间:局部操作为单位时间,全局读/写平均时间为$d$($d$随着处理器数目增加增加),同步路障时间为$B=B(p)$非降函数,全局phase内个处理器执行时间最长为$t_{ph}$,APRAM计算时间为$T=\Sigma t_{ph}+B\times 同步障次数$
-
优点:易于编程、分析复杂度,缺点:不适合MIMD-DM模型
-
BSP模型
-
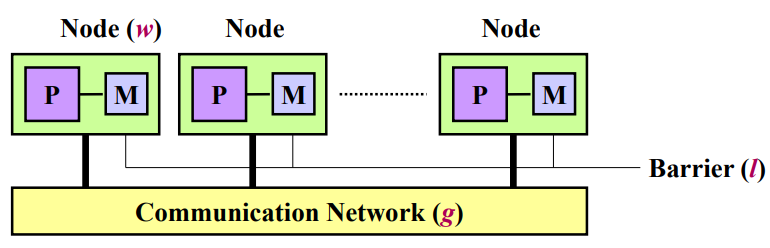
概念:”块“同步模型,block synchronized process,异步MIMD-DM模型 支持消息传递系统、块内异步并行、块间显式同步
-
模型参数:处理器数(带存储器)$p$,同步障时间barrier synchronization time $l$,带宽因子($time steps/packet=1/bandwidth$)$g$
-
-
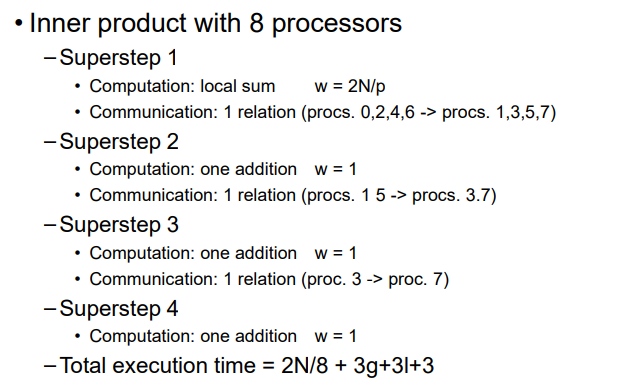
BSP时间复杂度:
- Valiant的原始版本:$max{w,gh,l}$,堆叠的通信和计算
- McColl的修改版本:$w+gh+l$
-
用例
-
向量内积
-
-
优点:强调计算通讯的分离,提供易于编程的环境和程序复杂性分析 缺点:显式同步机制,限制最多$h$条消息的传递
-
BSP vs PRAM:BSP是一般化的PRAM
- BSP如果$g=1$,等价于PRAM
logP模型
-
概念:分布存储的、点到点通讯的多处理机模型,隐式同步
-
模型参数:网络延迟network latency $L$,通信开销communication overhead $o$,每个处理器的通信带宽(处理器两次连续通信的最小距离)$g: gap=1/bandwidth$,处理器$P$ 其中$L,g$反映了网络通信的容量
-
特点:
-
异步模型asynchronous:无同步障、复杂算法设计
-
网络容量$network capacity=L/g$:最多$L/g$的信息可以从任何处理器传到另一个处理器,需要设置多线程限制
-
端到端:$L+2o$ 读取远程位置:$2L+4o$ 预取prefectching:$2o$
-
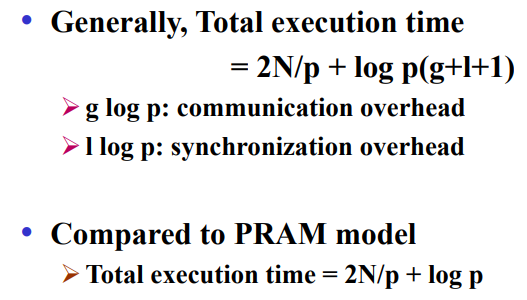
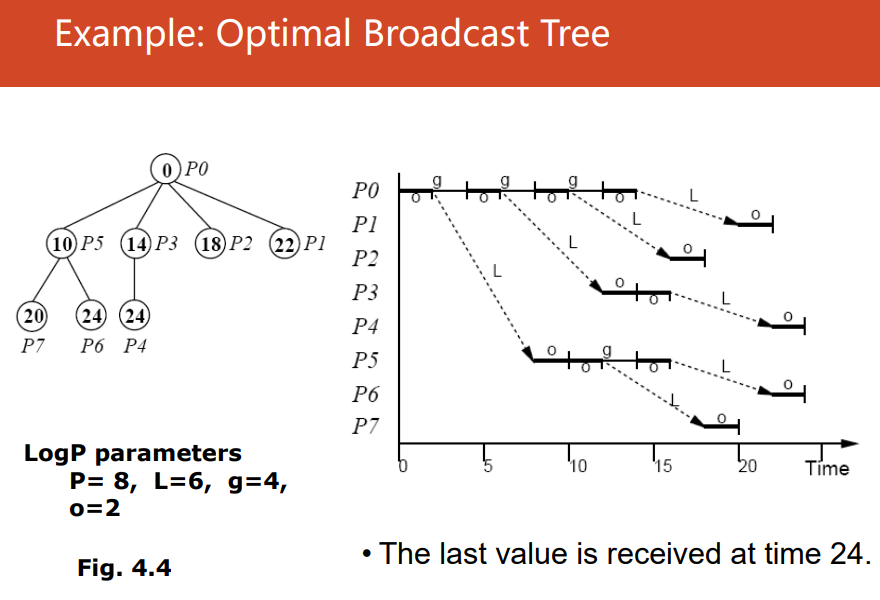
发送$n$条信息messages花费$2o+L+g(n-1)$
最优广播树optimal brodcast tree
-
优点:捕捉了MPC的通讯瓶颈,隐藏了并行机的网络拓扑、路由、协议,可以应用到共享存储、消息传递、数据并行的编程模型中 缺点:难以进行算法描述、设计和分析
-
BSP vs LogP
- BSP块同步—>BSP子集同步—>BSP进程对同步=LogP
- BSP可以常数因子模拟LogP,LogP可以对数因子模拟BSP
- BSP=LogP+Barrieres-Overhead
- BSP便于编程,LogP利用机器资源效率更高
- LogP使用基于成对异步pairwise synchronization消息传递
- LogP多了参数传输开销overhead
-
-
总结
- PRAM:设计高效并行算法的简单、最好的概念模型,关注负载均衡
- BSP(bulk synchronous parallel):计算后通信,循环loop(superstep、barrier synch、communicate)
- LogP:延迟latency,开销overhead、通信带宽gap、处理器P
性能评测
概述
性能评测(performance evaluation):性能评价和性能分析
机器级性能评测:CPU和存储器的基本性能指标、并行和通信开销分析;并行机的可用性和好用性;机器成本、价格和性价比
算法级性能评测:加速比、效率、扩展性
程序级性能评测:基准程序benchmark
计算机性能
- 性能performance:单位$/s$
- 程序执行时间elapsed time:用户响应时间(IO时间+访存时间+CPU时间+OS开销)
- CPU时间:CPU工作时间
工作负载workload和速度
-
工作负载:百万浮点计算数MFLOP、百万指令数MI
-
速度:MFLOPS,MIPS
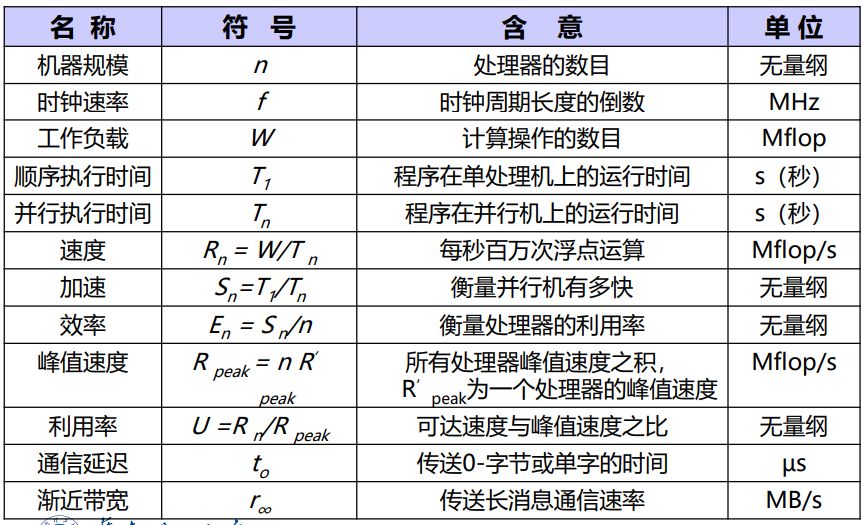
加速比(speedup):$S_p=\frac{sequential\ execution\ time}{parallel\ execution\ time}$,串行、并行时间比(加速了多少)
并行效率(parallel efficiency):$Efficiency=\frac{Speedup}{Number\ of\ processors}$
加速比性能定律
超线性加速比(S>p):
- Amdahl定律:固定规模的加速比
- 处理器数$P$
- 问题规模$W$
- 应用程序中的串行分量$W_s$
- 串行分量比例$f=W_s/W,\ W_1=W_s+W_o$
- 应用程序可并行化部分$W_p$,并行分量比例$1-f$
- $W=W_s+W_p$
- 串行执行时间$T_s=T_1$,并行执行时间$T_p$
- 加速比$S$,效率$E$
- 出发点:固定不变的负载均衡,分布在多个处理器上,增加处理器来加快执行速度
- 固定规模fixed-size的加速比:$performance=\frac{work}{time}$ $speedup(p)=\frac{performance(p)}{performance(l)}=\frac{time(l)}{time(p)}$
- $S=\frac{W_s+W_p}{W_s+W_p/p}=\frac{1}{f+\frac{1-f}{p}}=\frac{p}{1+f(p-1)}\rarr \frac{1}{f}\ as\ p\rarr \infin$
- 如果f=10%,则最大加速比是10
- 增强的Amdahl定律:考虑开销$W_o$
- $S=\frac{W_s+W_p}{W_s+W_p/p+W_o}=\frac{W}{fW+\frac{W(1-f)}{p}+W_o}=\frac{p}{1+f(p-1)+W_op/W}\rarr \frac{1}{f+\frac{W_o}{W}}\ as\ p\rarr \infin$
- Gustafson定律:固定时间的加速比
- $S=\frac{Work(p)}{Work(l)}=\frac{W_s+pW_p}{W_s+W_p}=f+p(1-f)=p-f(p-1)$(有p个处理器)
- 增强的Gustafson定律:考虑开销$W_o$
- $S=\frac{W_s+pW_p}{W_s+W_p+W_o}=\frac{f+p(1-f)}{1+W_o/W}$
- Sun&Ni定律:
- $S=\frac{Work(p)/Time(p)}{Work(l)/Time(l)}=\frac{f+(1-f)G(p)}{f+(1-f)G(p)/p}$
- 特点
- $G(p)=1$是Amdahl加速定律
- $G(p)=p$变为$f+p(1-f)$,就是Gustafson加速定律
- $G(p)>p$,计算机负载比存储要求增长块,S加速比高于A加速比和G加速比
可扩展性评测标准
-
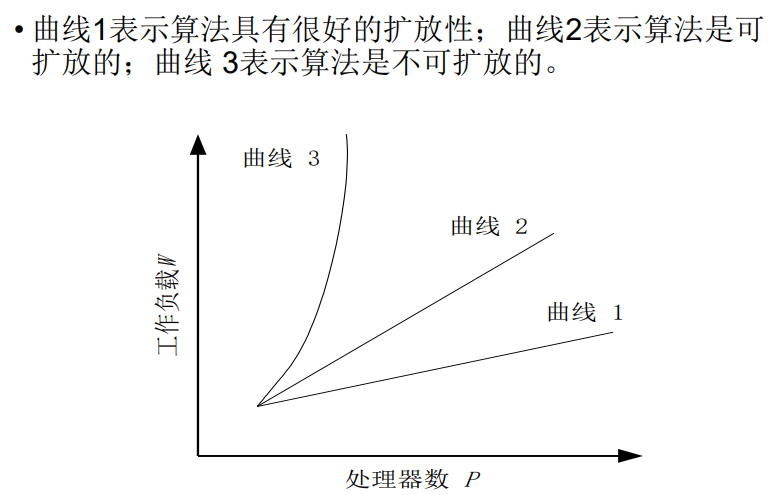
可扩展性
-
影响加速比的因素:系统规模和问题规模(处理器数量和任务数,理论上任务越多扩展性越好)
-
对并行系统,在系统规模和数据规模变化时的执行时间更有意义
-
三种量化方式:
-
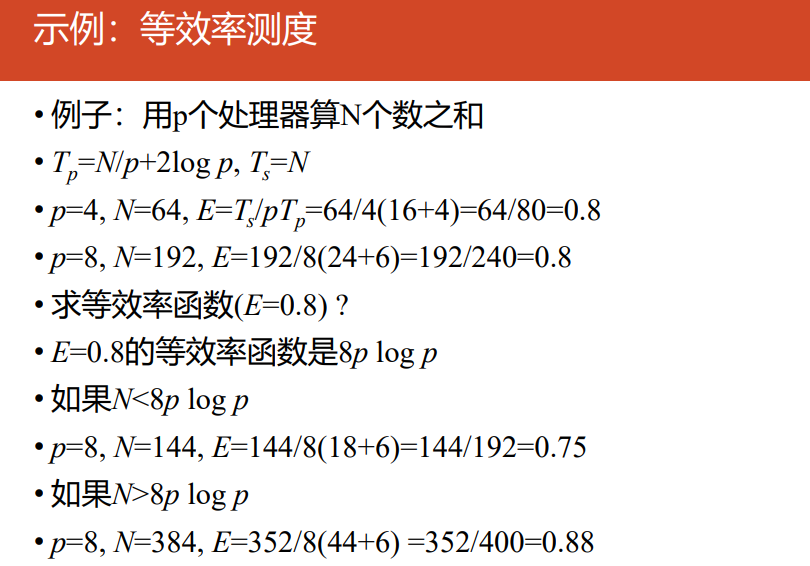
等效率测度efficiency metrics:效率,加速比/处理器数 $E=\frac{S}{p}=\frac{1}{1+\frac{W_o}{W}}$
-
等速度测度speed metrics:速度,每秒处理的数据量 $\overline{V}=\frac{V}{p}=\frac{W}{pT} $
-
平均时延测度latency metrics:时延,理想并行时间和实际并行时间的差距
-
-